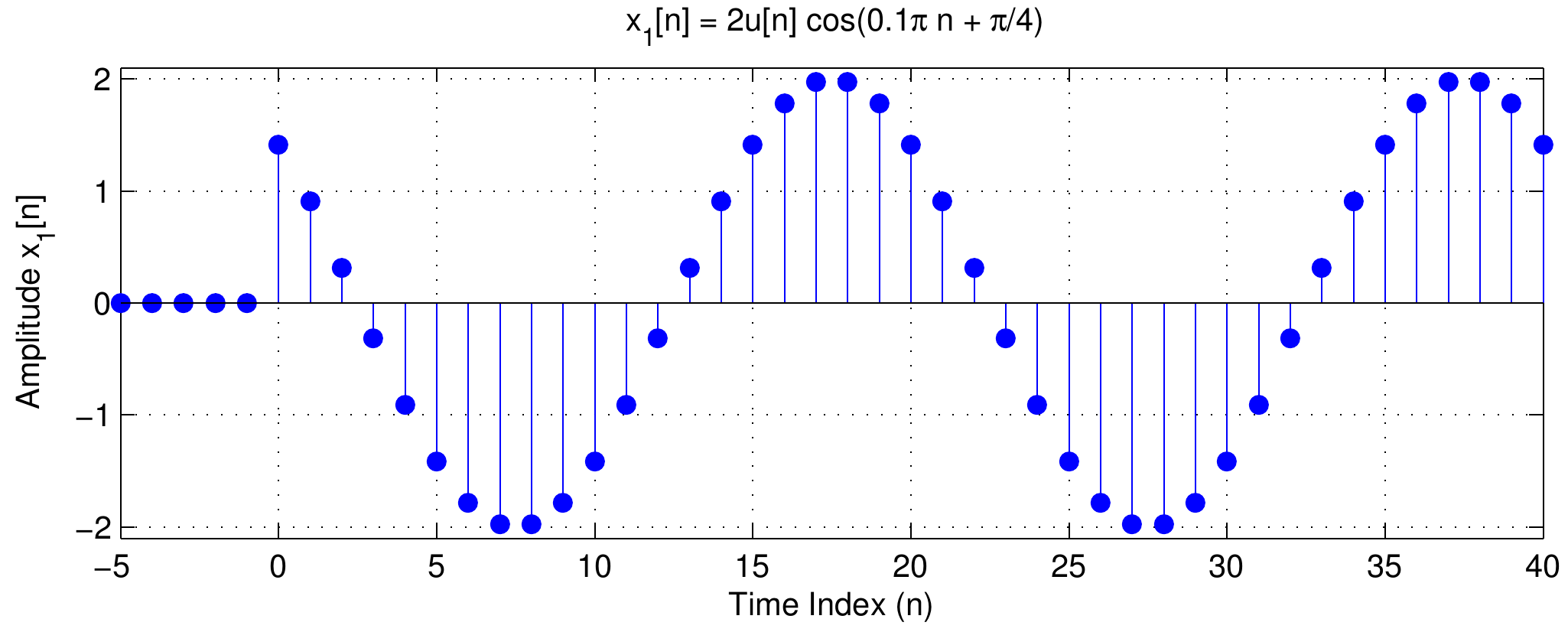
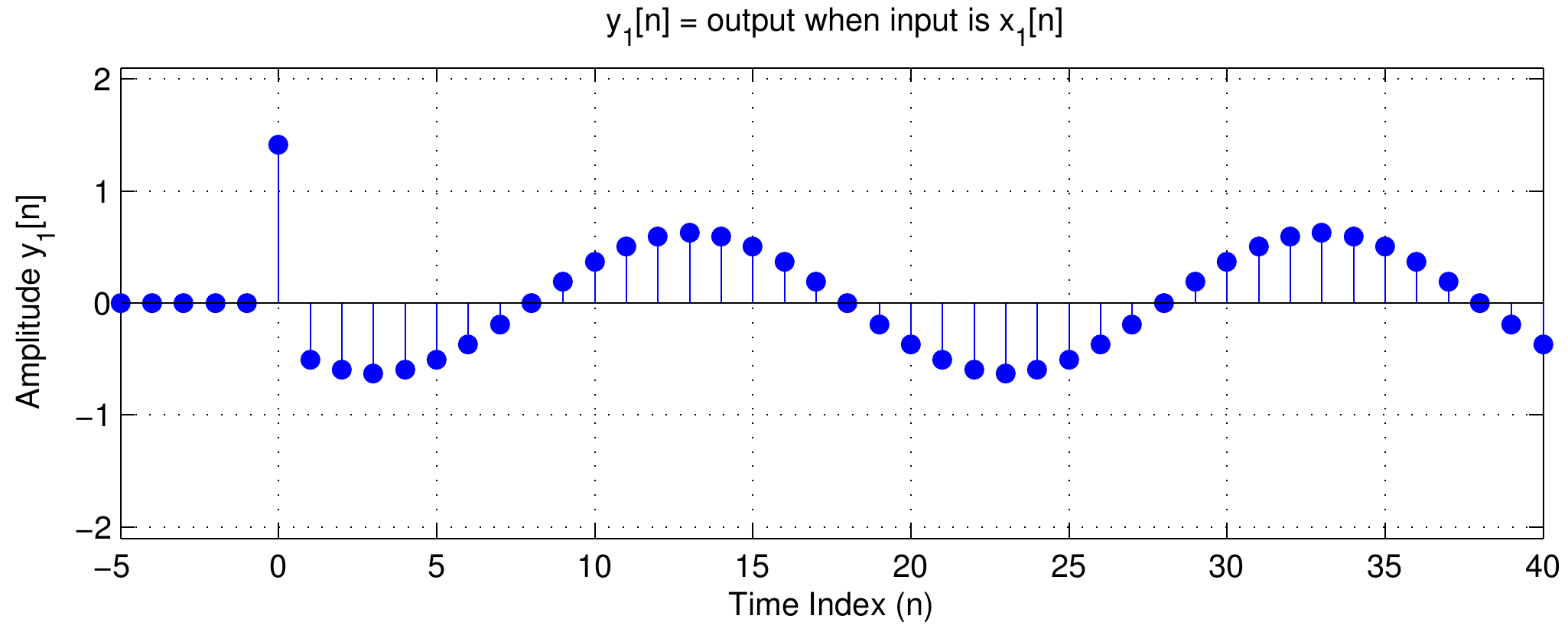
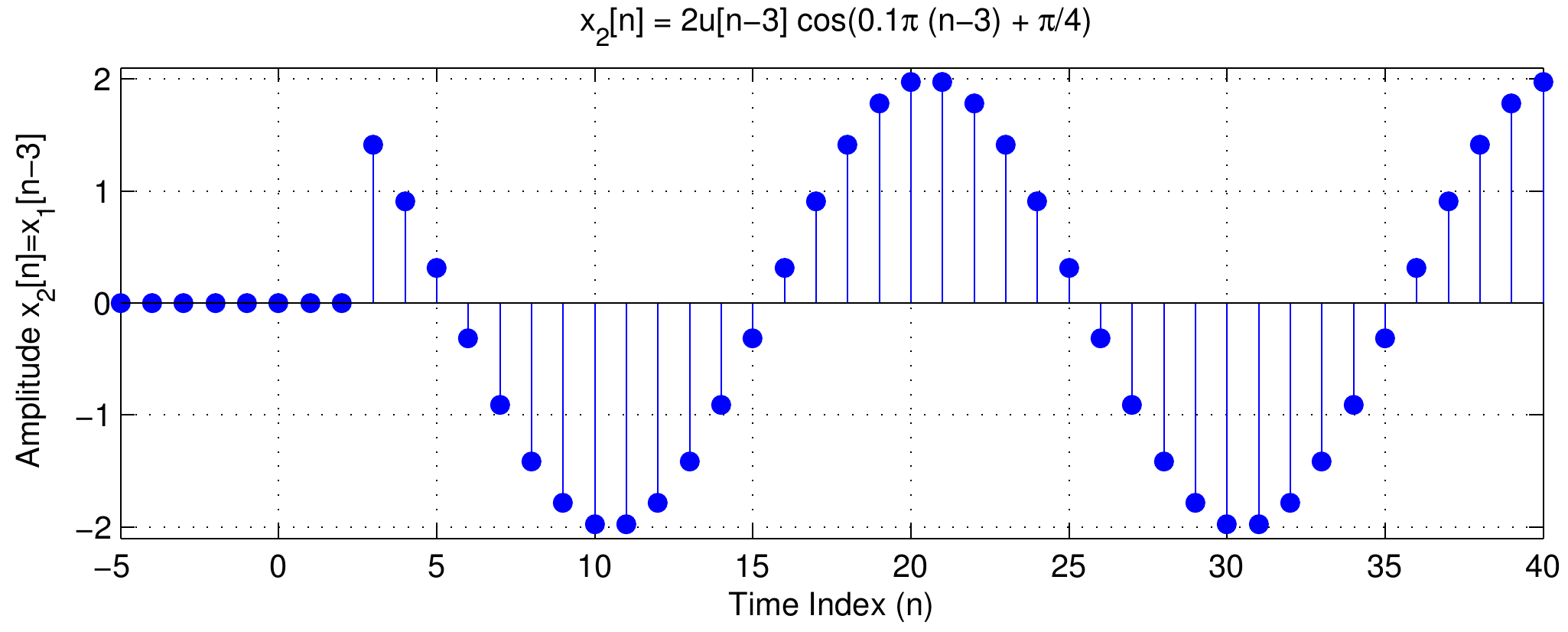
Time Invariance: 1st Difference Filter
|
 |
|
|
|
|
 DSP First 2e
DSP First 2e
McClellan, Schafer, Yoder
ISBN-10: 0136019250 • ISBN-13: 9780136019251
© 2016 Pearson Education, Inc.
|
|
|
|
|
|
|
|
DSP First 2e