DSP FIRST 2e
10. IIR Filters
–
Examples
21
10
.1: IIR Block Diagram
10
.2: Impulse Response
10
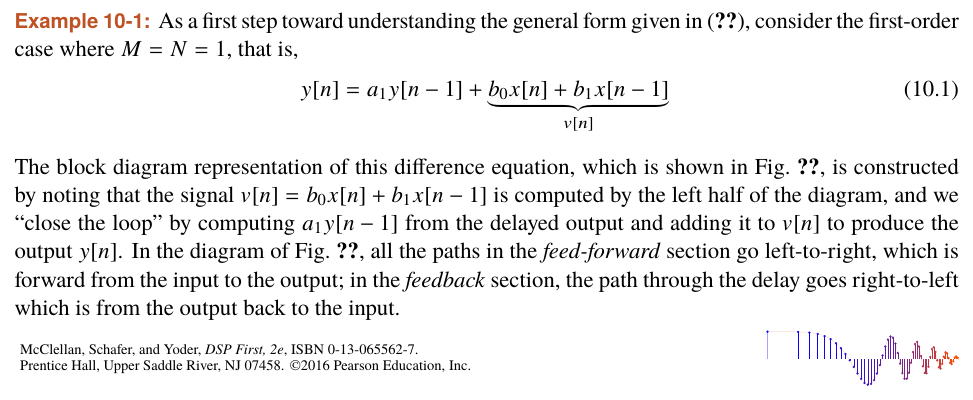
.3: IIR Response to General Input
10
.4: Unstable System
10
.5: MATLAB for IIR Filter
10
.6: \(H(z)\) from Impulse Response
10
.7: Find Poles and Zeros
10
.8: Zeros at \(z=\infty\)
10
.9: Stability from Pole Location
10
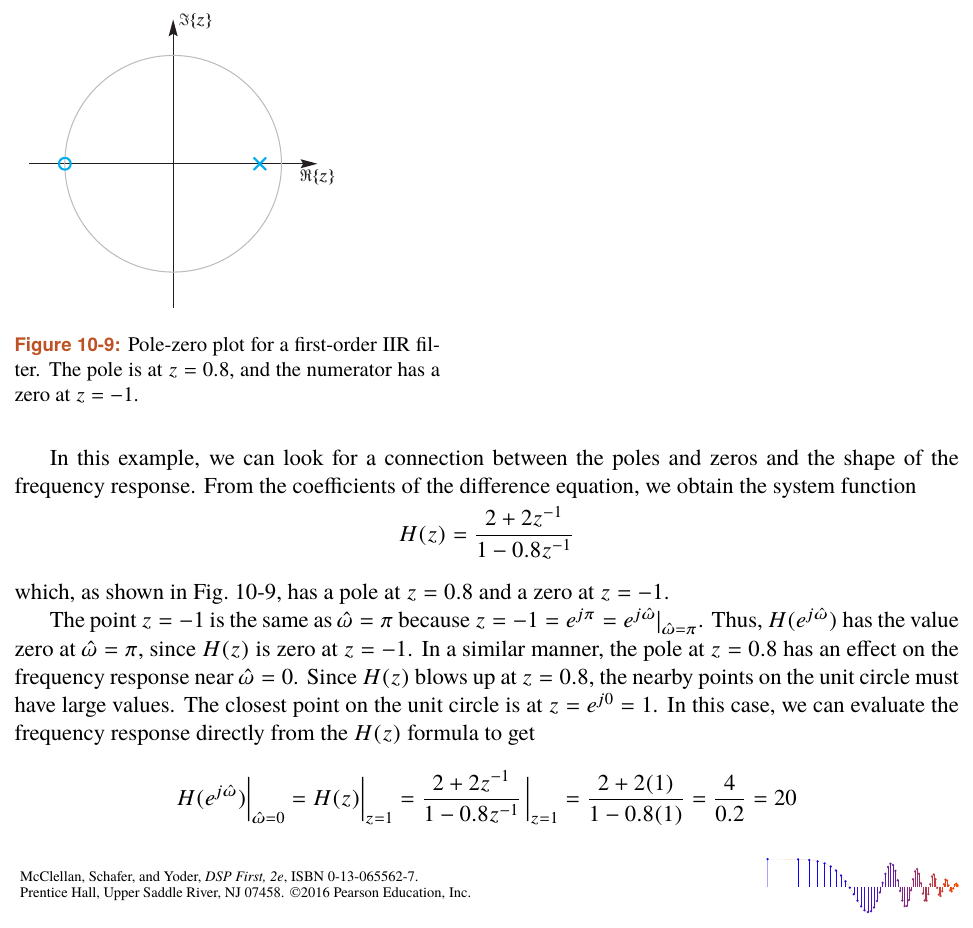
.10: Plot \(H(e^{j\hat\omega})\) via MATLAB
10
.10a:
10
.11: Inverse \(z\mbox{-}\)Transform
10
.12: Long Division and Partial Fractions
10
.13: Transient and Steady-State Responses
10
.14: Complex Poles
10
.15: Second-Order System Real Poles
10
.16: Second-Order System
10
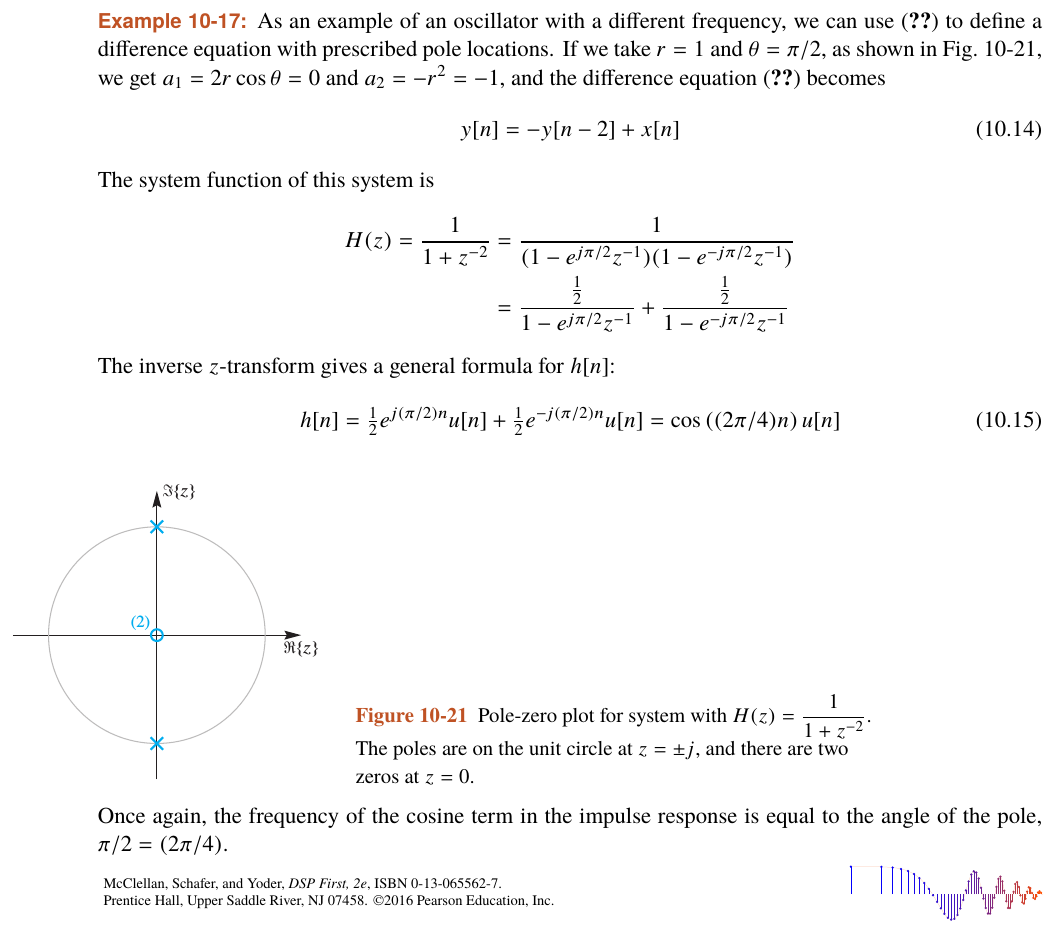
.17: Poles on Unit Circle
10
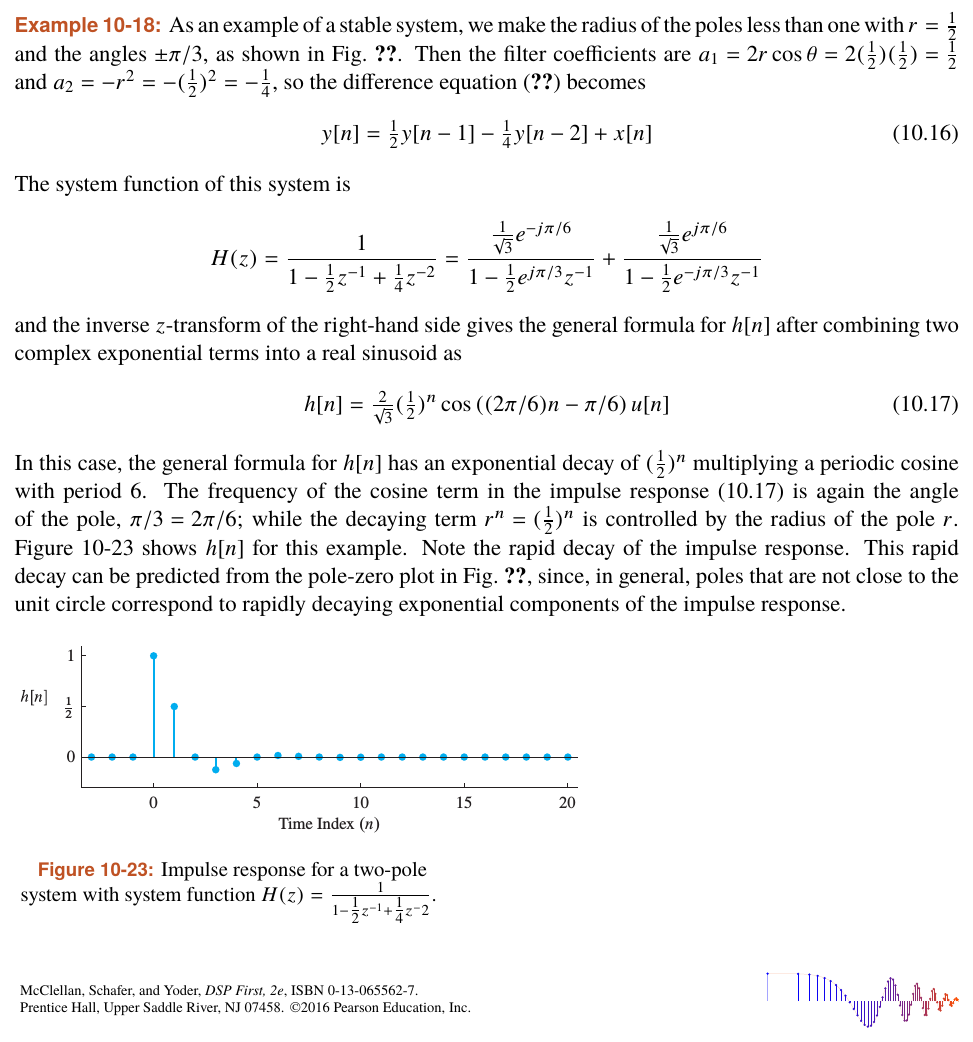
.18: Stable Complex Poles
10
.19: Frequency Response of a Second-Order System
10
.20: MATLAB for \(H(e^{j\hat\omega})\)