DSP FIRST 2e
5. FIR Filters
–
Problems with selected Solutions
77
5
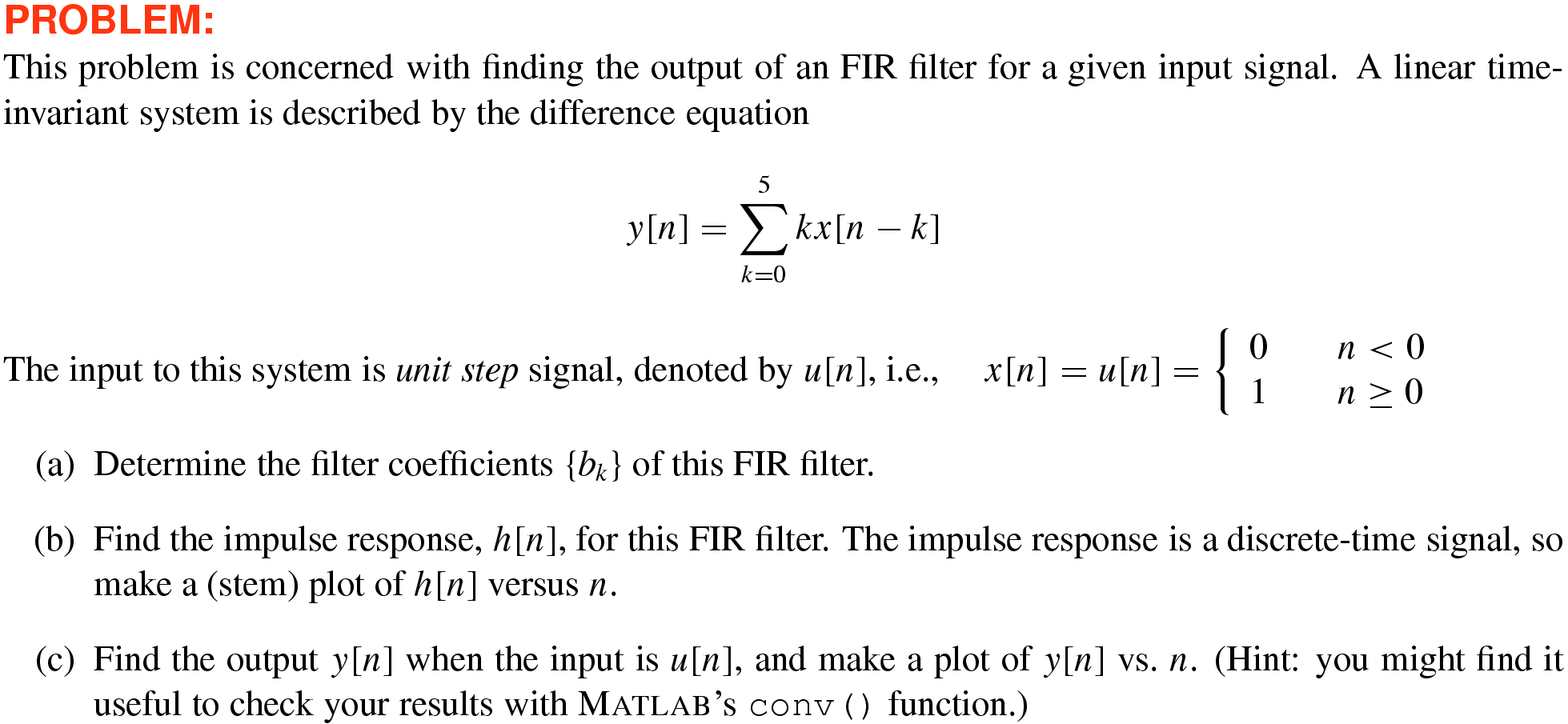
–1 Unit-step response of FIR system via convolution
Solution
5
–2 Length of Convolution
Solution
5
–3 Impulse response of cascaded LTI systems
Solution
5
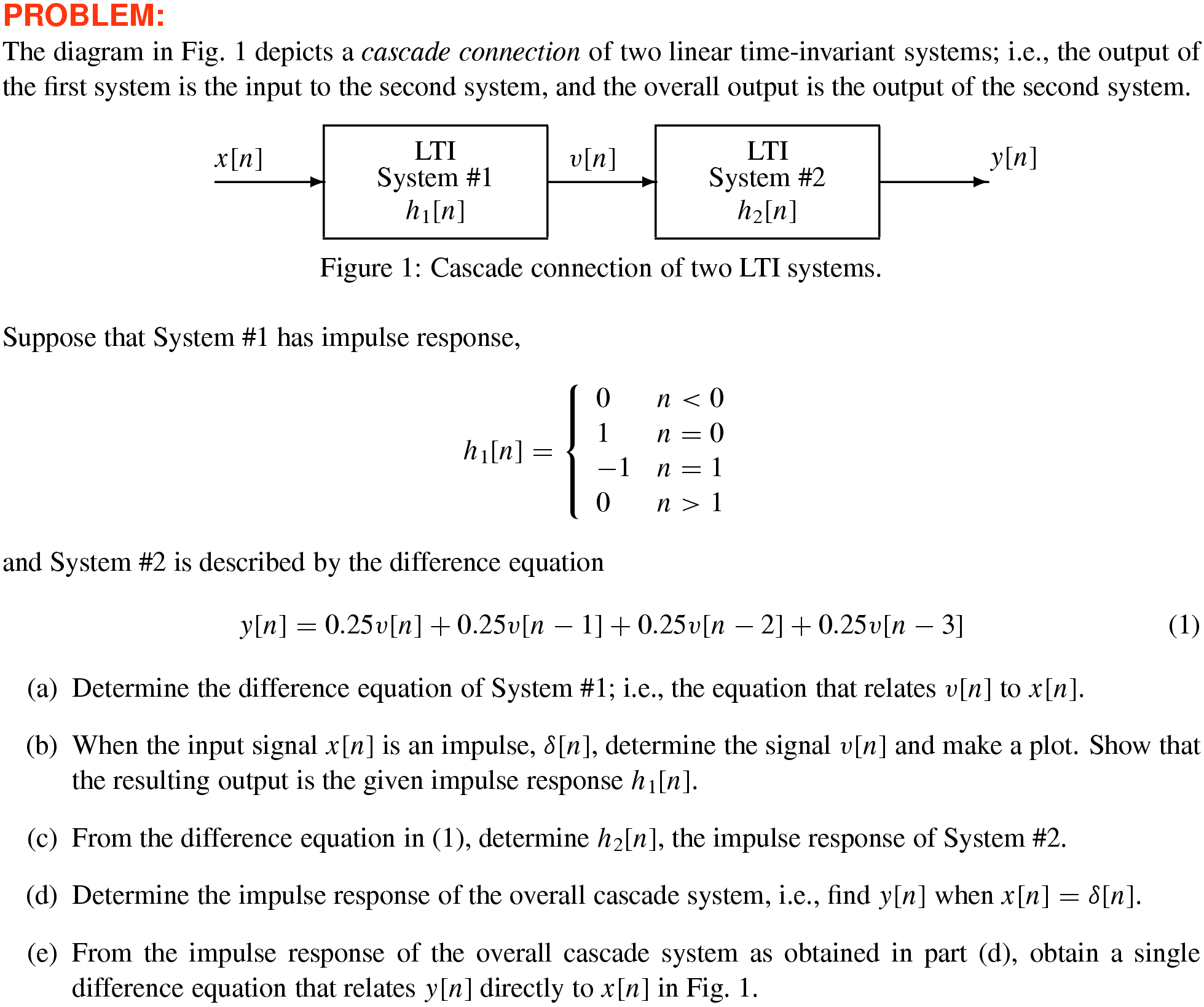
–4 Difference equation and impulse response of cascaded LTI systems
Solution
5
–5 Block diagram of FIR system and output signal
Solution
5
–6 Output from FIR Filter for Finite-Length Input Signal ♦ Impulse Response
Solution
5
–7 Output from FIR Filter for Complex Exponential Input Signal
Solution
5
–8 Running Average FIR Filter ♦ Step Response
Solution
5
–9 Linearity & Time-Invariance Properties
Solution
5
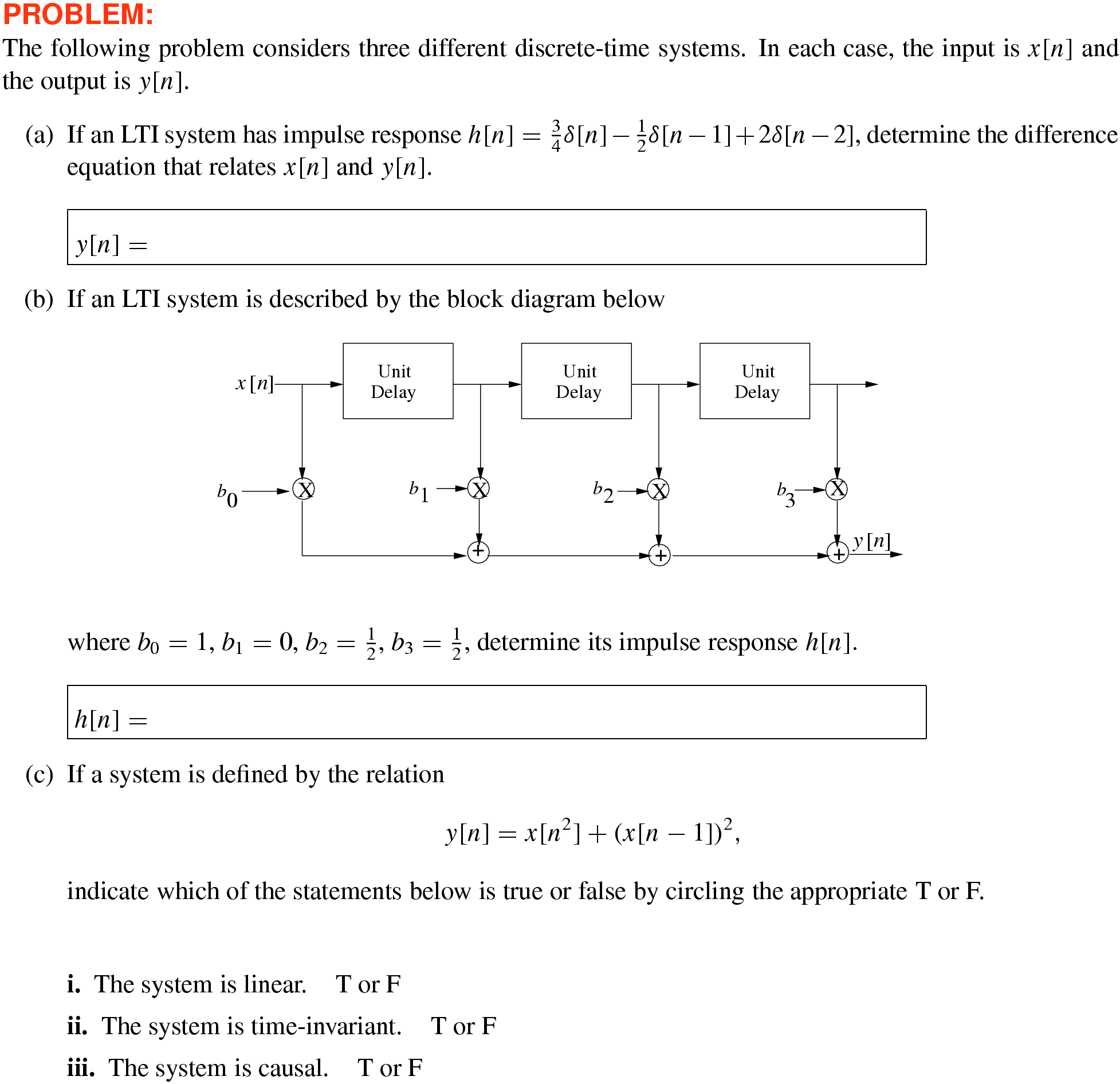
–10 Difference Equation
Block Diagram of FIR Filter
Solution
5
–11 Plot Finite-Length Signal \(x[n]\) Defined by Shifted Impulses
Solution
5
–12 Difference Equation from Block Diagram of FIR Filter
Solution
5
–13 Linearity & Time-Invariance Used to Construct Output Signal
Solution
5
–14 Output from FIR Filter for Complex Exponential Input Signal
Solution
5
–15 Output of LTI System to \(u[n]\)
5
–16 Output of LTI System to Complex Exponentials
5
–17 Output from FIR Filter for Finite-Length Input Signal
5
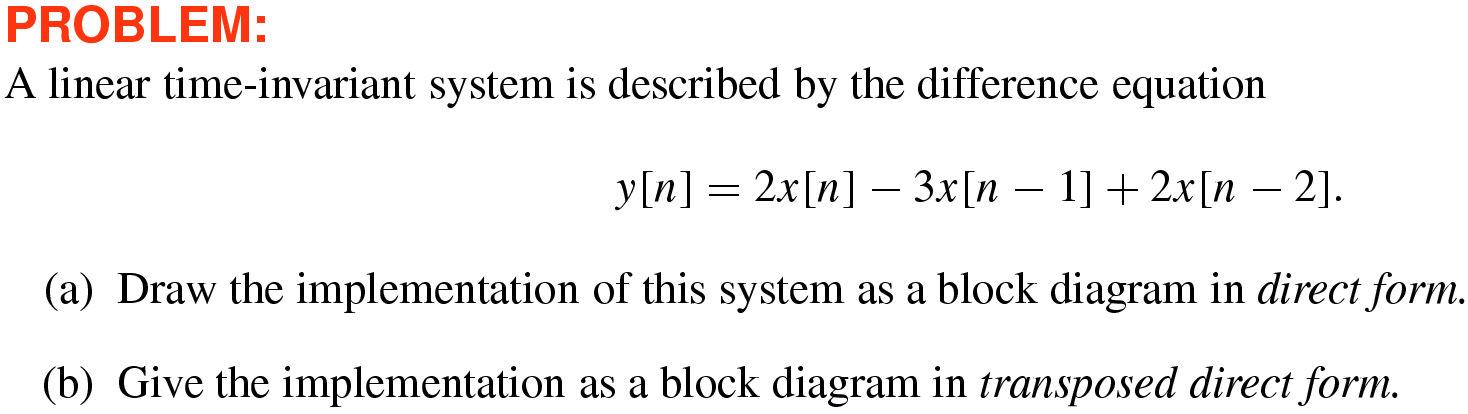
–18 Draw Block Diagrams from FIR Difference Equation
5
–19 Determine the Duration of the Output of an FIR Filter
5
–20 Construct Output via Linearity and Time-Invariance
5
–21 Construct Output via Linearity and Time-Invariance
5
–22 Impulse response of cascade of two systems
Solution
5
–23 Properties of LTI systems
Solution
5
–24 Output signal using linearity & time-invariance
Solution
5
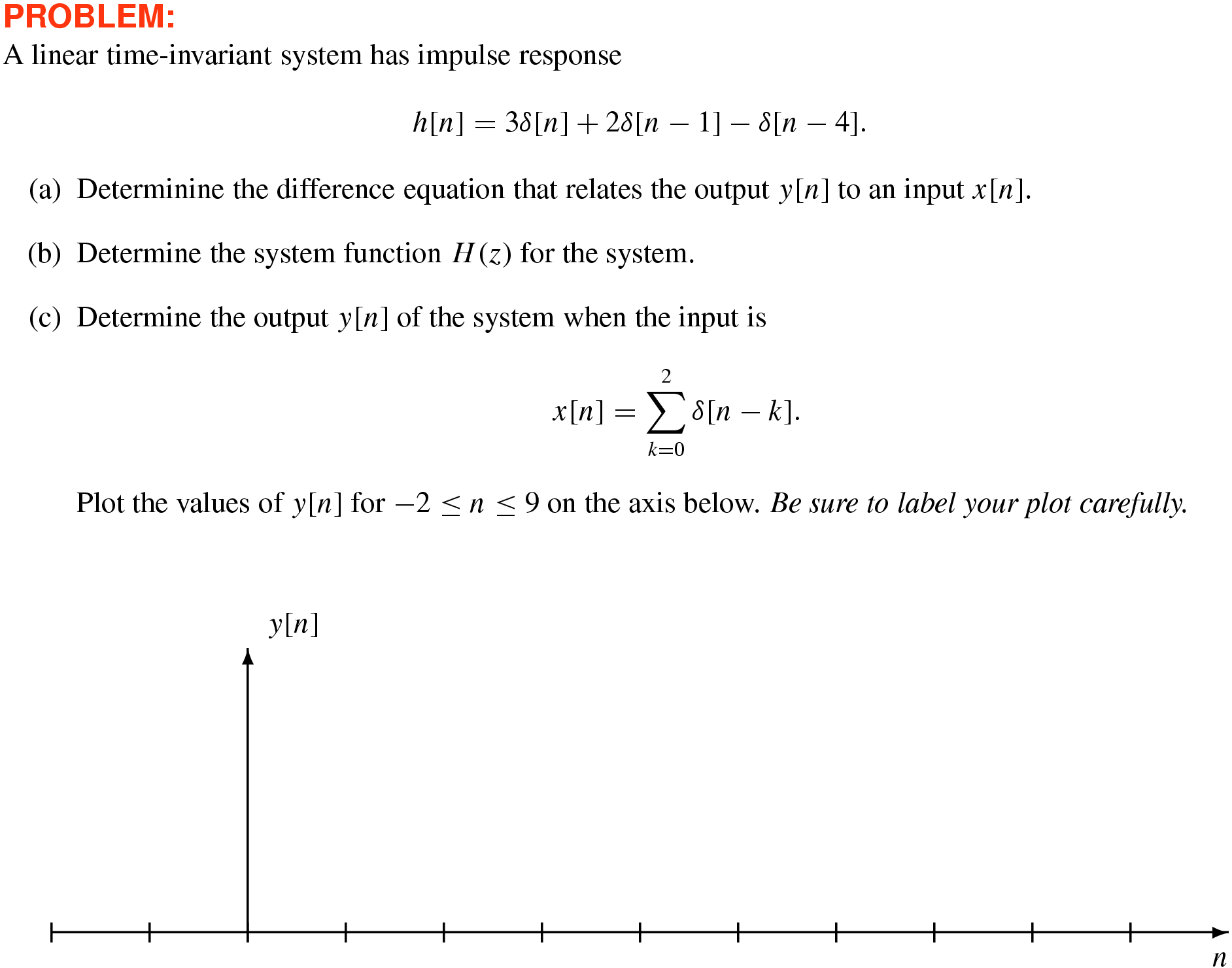
–25 Difference equation and \(H(z)\) from impulse response
Solution
5
–26 Difference equation and \(H(z)\) from impulse response
Solution
5
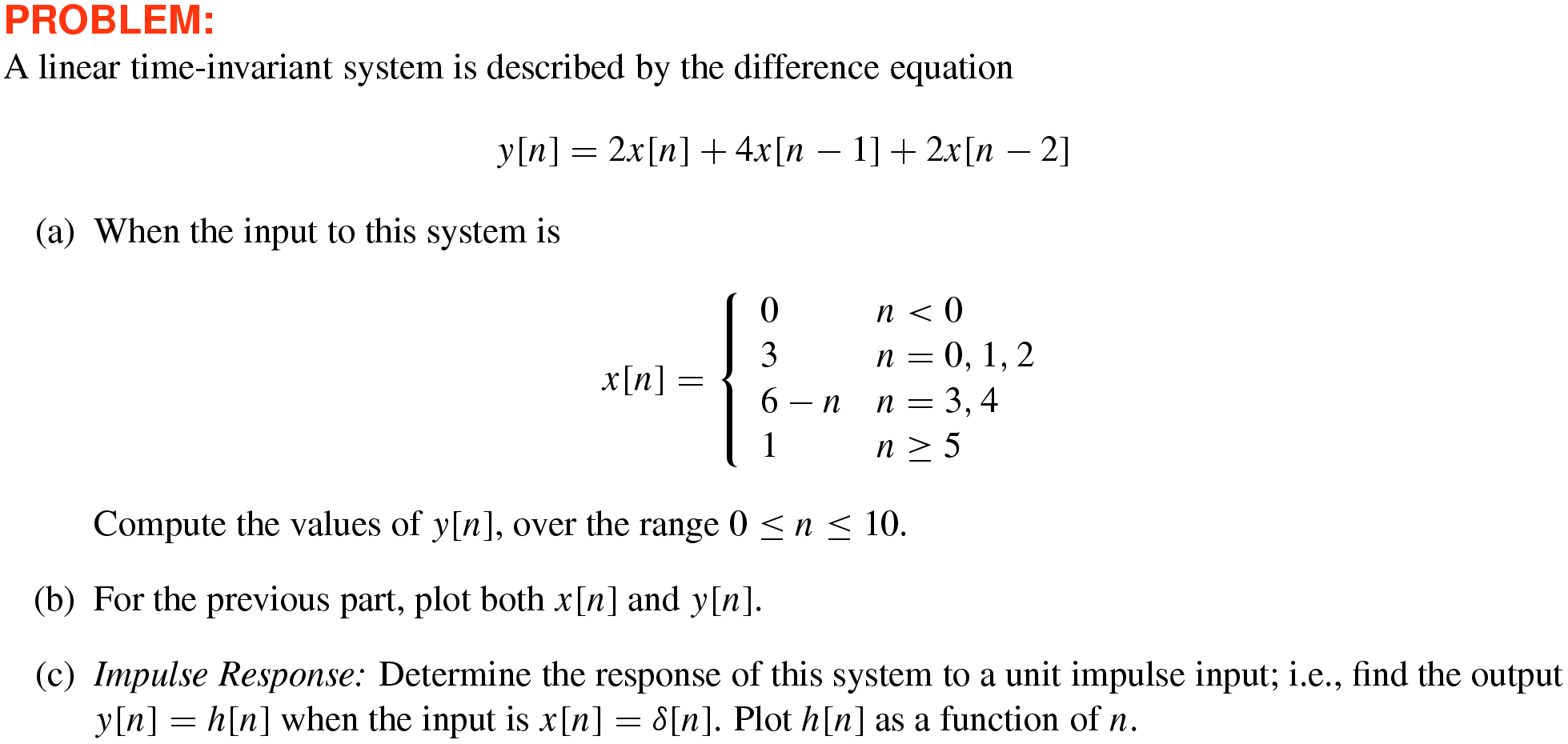
–27 Determine the Output of an FIR Filter for a Given Input
Solution
5
–28 Determine the Duration of the Output of an FIR Filter
Solution
5
–29 Cascade Connection of LTI Systems
Solution
5
–30 Find Outputs of an FIR Filter for Step and Cosine Inputs
Solution
5
–31 Find Outputs of an FIR Filter for Step and Cosine Inputs
Solution
5
–32 Find Outputs of an FIR Filter for Step and Cosine Inputs
Solution
5
–33 Using the Unit Step Sequence to Represent a Finite-Length Signal
Solution
5
–34 Determine the Duration of the Output of an FIR Filter
Solution
5
–35 Cascade Connection of LTI Systems
Solution
5
–36 Test for Linearity and Time-Invariance
5
–37 Unit step response of 3-point averager
Solution
5
–38 Nonzero region of FIR filter output
Solution
5
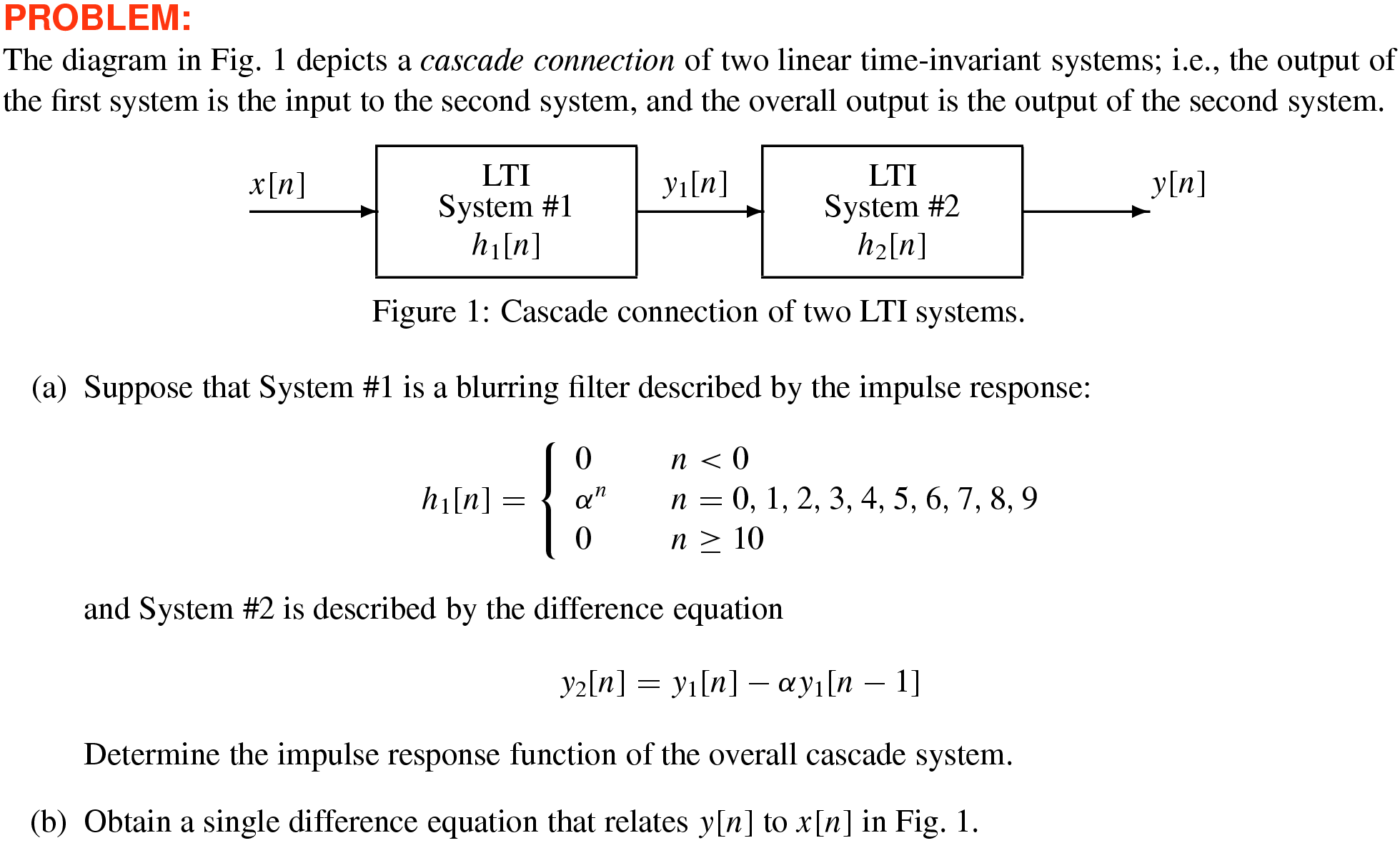
–39 Impulse response & difference equation of cascaded systems
Solution
5
–40 FIR filtering of signal defined by its spectrum
Solution
5
–41 Difference equation & block diagram from impulse response
Solution
5
–42 Output from convolution of impulse response & input pulse
Solution
5
–43 Difference equation & block diagram from impulse response
Solution
5
–44 Output from convolution of impulse response & input pulse
Solution
5
–45 Difference equation & block diagram from impulse response
Solution
5
–46 Output from convolution of impulse response & input pulse
Solution
5
–47 Linearity & Time-Invariance Used to Construct Output Signal
Solution
5
–48 Linearity & Time-Invariance Used to Construct Output Signal
Solution
5
–49 Output from FIR Filter for Finite-Length Input Signal
Solution
5
–50 Output from FIR Filter for Complex Exponential Input Signal
Solution
5
–51 Output from FIR Filter for Finite-Length Input Signal
Solution
5
–52 Impulse Response of FIR Filter ♦ Complex Exponential Response
Solution
5
–53 Output of LTI System to Finite Length Complex Exponential
5
–54 Output from FIR Filter for Finite-Length Input Signal
Solution
5
–55 Construct Output via Linearity and Time-Invariance
Solution
5
–56 Matching Output Signal to \(h[n]\) or Difference Equation
Solution
5
–57 Output from FIR Filter for Complex Exponential Input Signal
Solution
5
–58 Linearity & Time-Invariance Used to Construct Output Signal
Solution
5
–59 Output from FIR Filter for Complex Exponential Input Signal
Solution
5
–60 Running Average FIR Filter ♦ Step Response
Solution
5
–61 Output from FIR Filter for Finite-Length Input Signal
Solution
5
–62 Output from FIR Filter for Finite-Length Input Signal
Solution
5
–63 Output from FIR Filter for Finite-Length Input Signal
Solution
5
–64 Linearity & Time-Invariance Used to Construct Output Signal
Solution
5
–65 Output from FIR Filter for Complex Exponential Input Signal
Solution
5
–66 Linearity & Time-Invariance Used to Construct Output Signal
Solution
5
–67 Output from FIR Filter for Finite-Length Input Signal ♦ Impulse Response
Solution
5
–68 Output of LTI System to \(u[n]\)
Solution
5
–69 Determine the Duration of the Output of an FIR Filter
Solution
5
–70 Construct Output via Linearity and Time-Invariance
Solution
5
–71 Find Output of FIR Filter Given Coefficients
Solution
5
–72 Construct Output via Linearity and Time-Invariance
Solution
5
–73 Output from FIR Filter for Finite-Length Input Signal
Solution
5
–74 Cascade of Two LTI Systems
Solution
5.1
–75 Running Average FIR Filter ♦ Time Response
Solution
5.6
–76 Output from FIR Filter for Finite-Length Input Signal
Solution
5.8
–77 Linearity & Time-Invariance Used to Construct Output Signal
Solution