DSP FIRST 2e
9.
z
-Transforms
–
Problems with selected Solutions
89
9
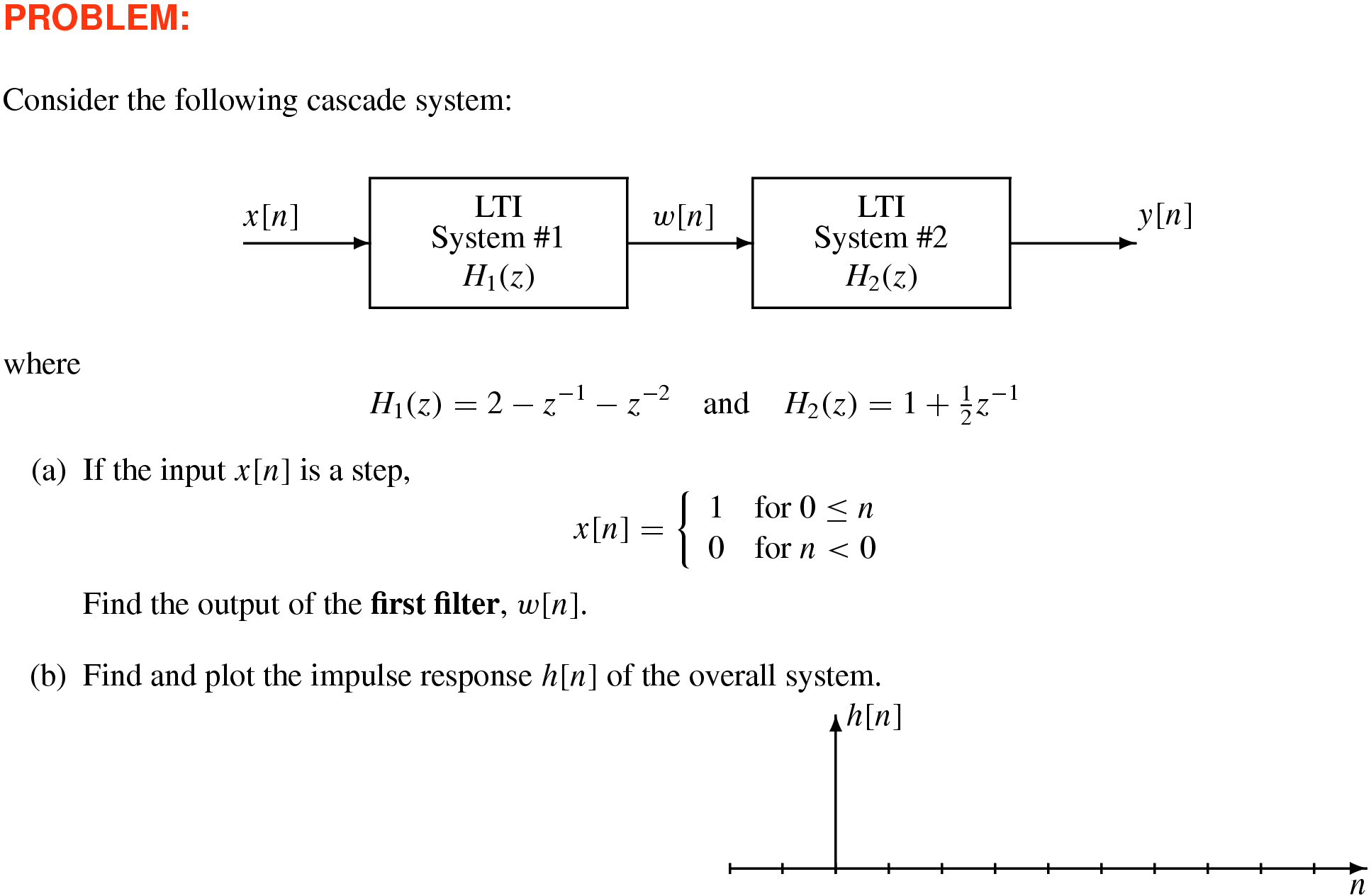
–1 Impulse and step response for cascaded FIR systems
Solution
9
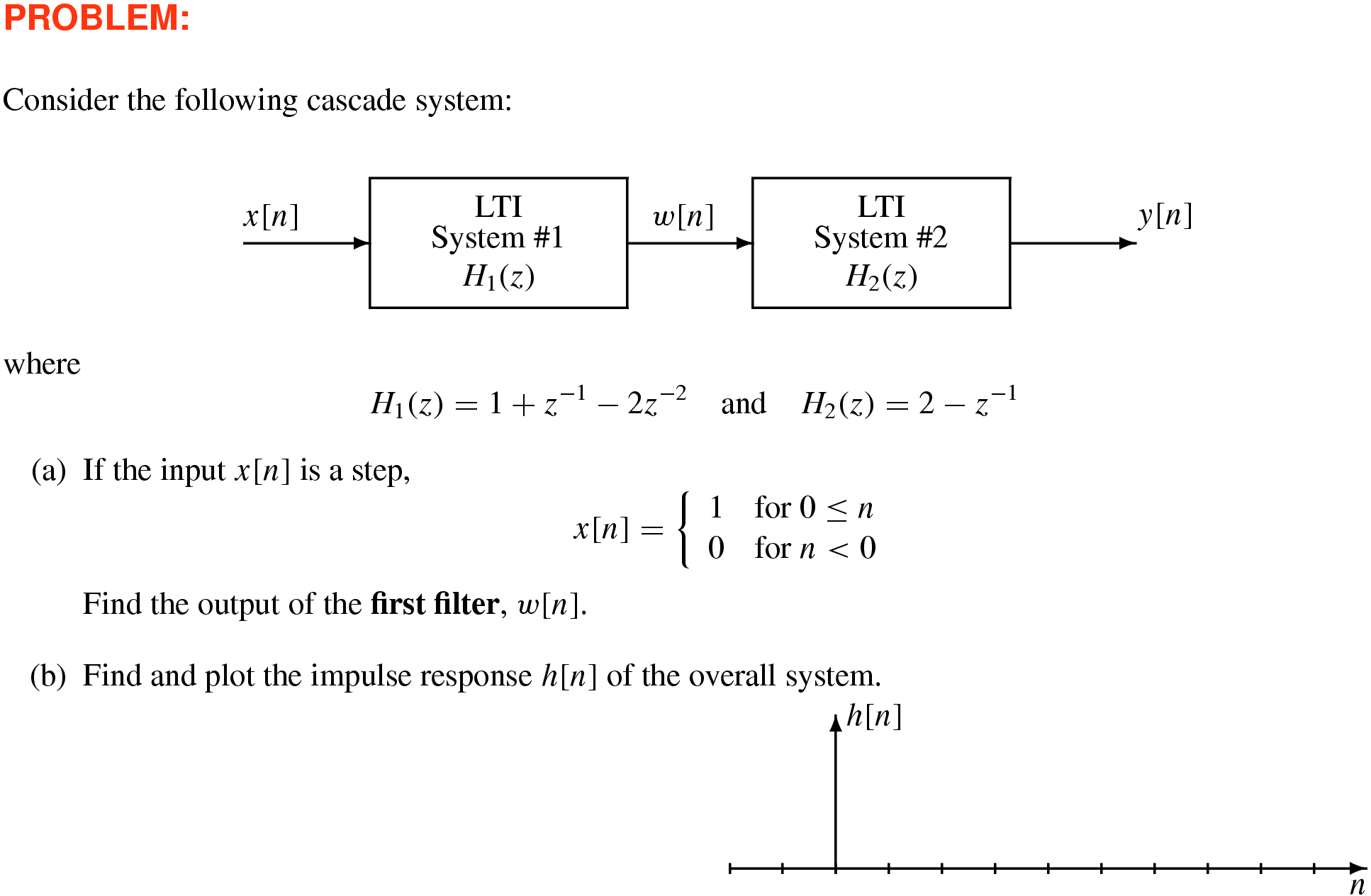
–2 Impulse and step response for cascaded FIR systems
9
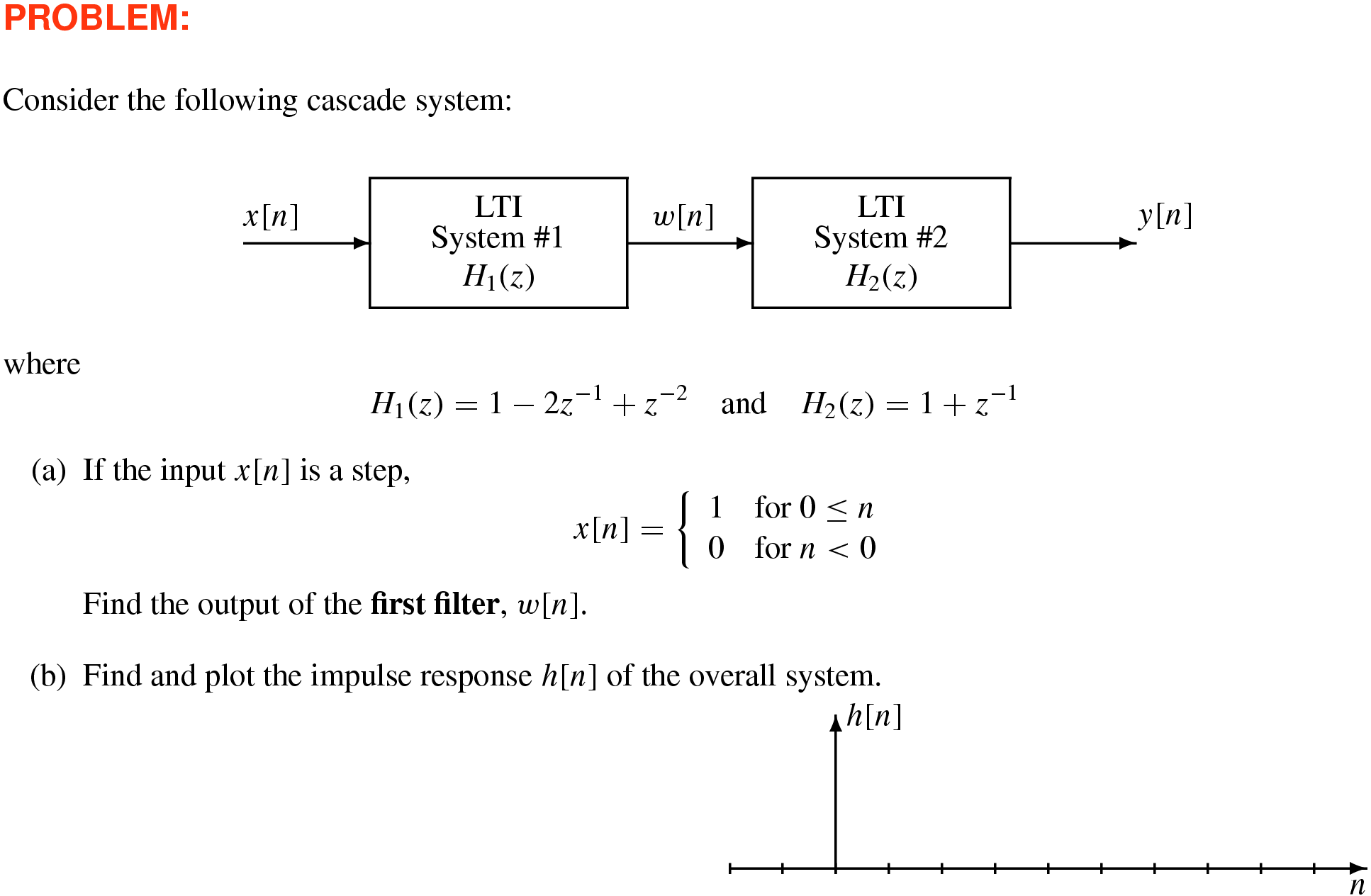
–3 Impulse and step response for cascaded FIR systems
9
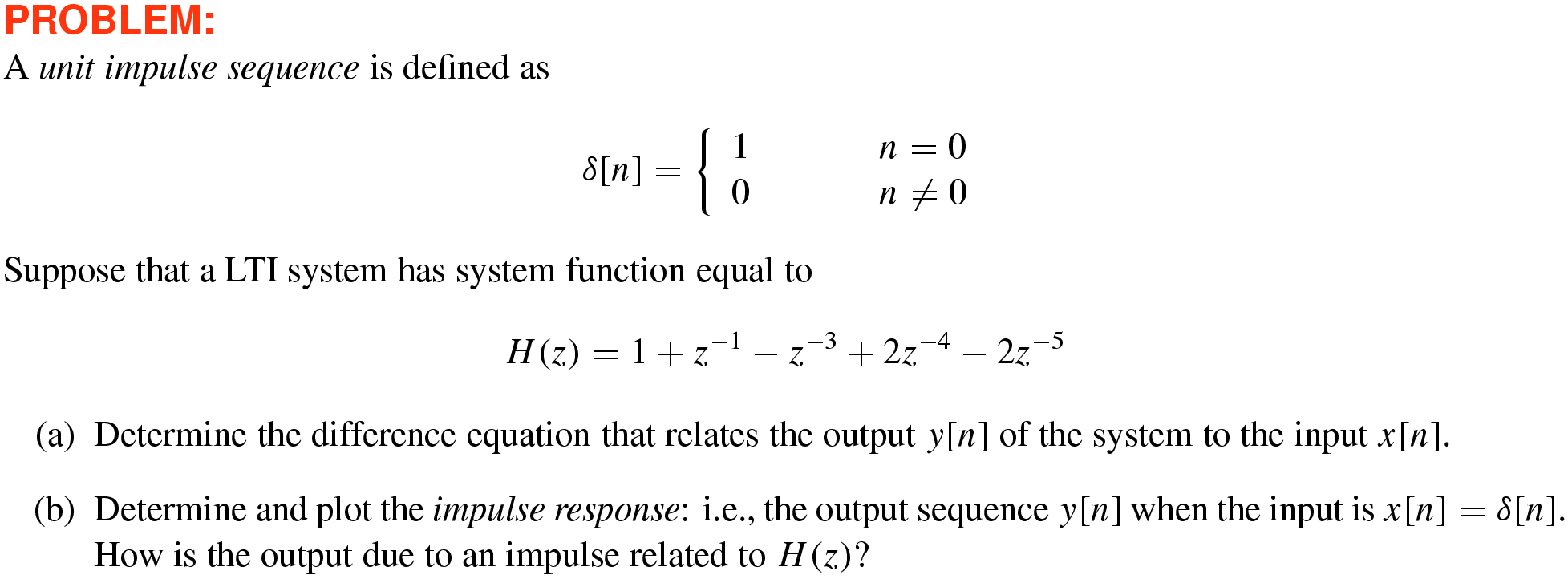
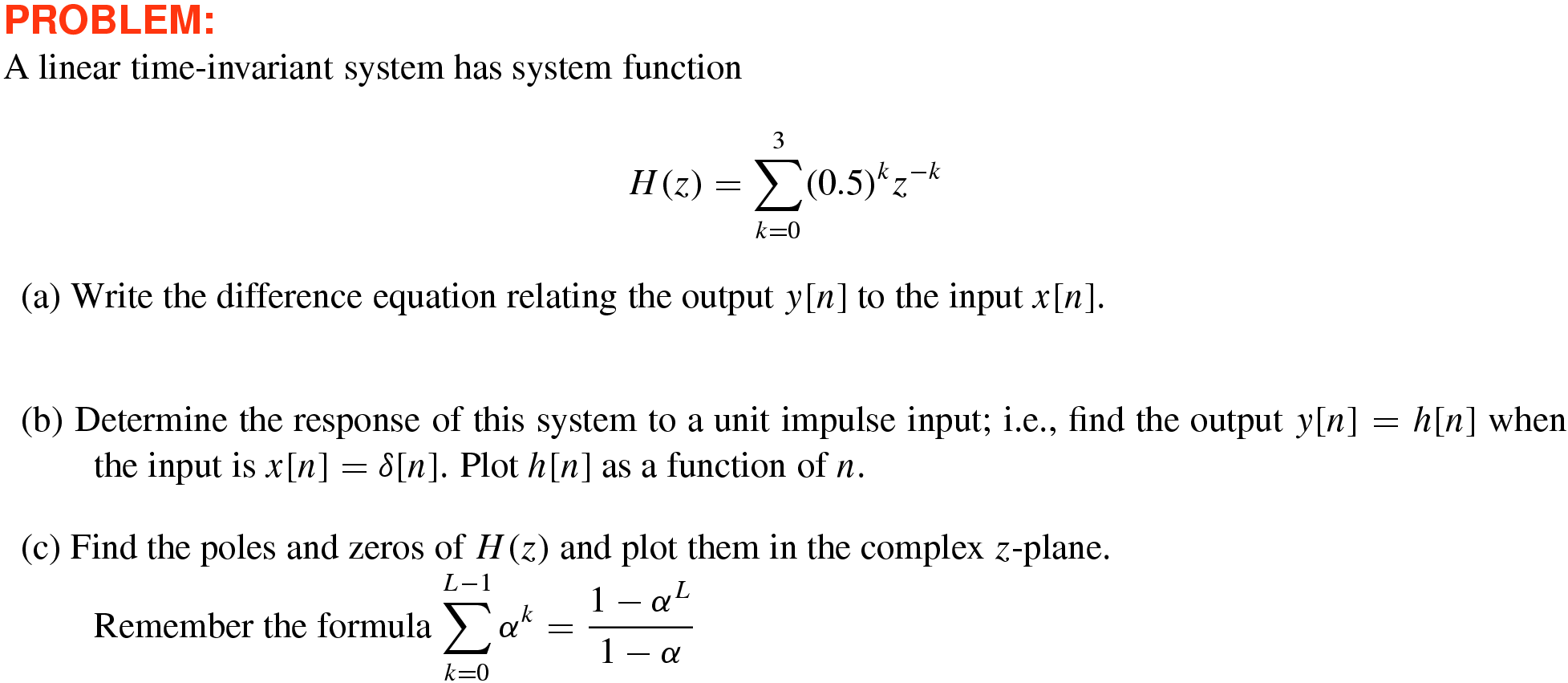
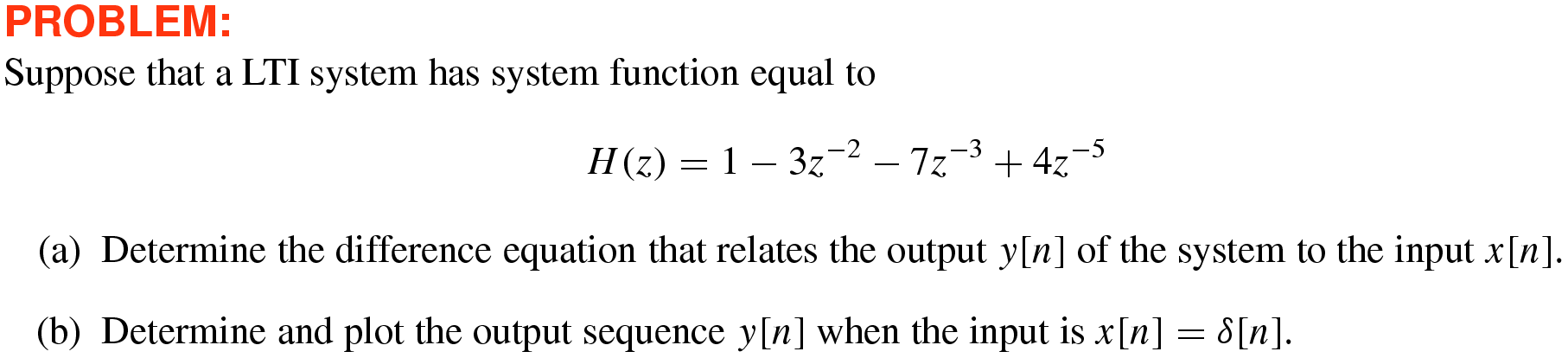
–4 Difference Equation from \(H(z)\) ♦ Impulse Response \(h[n]\)
Solution
9
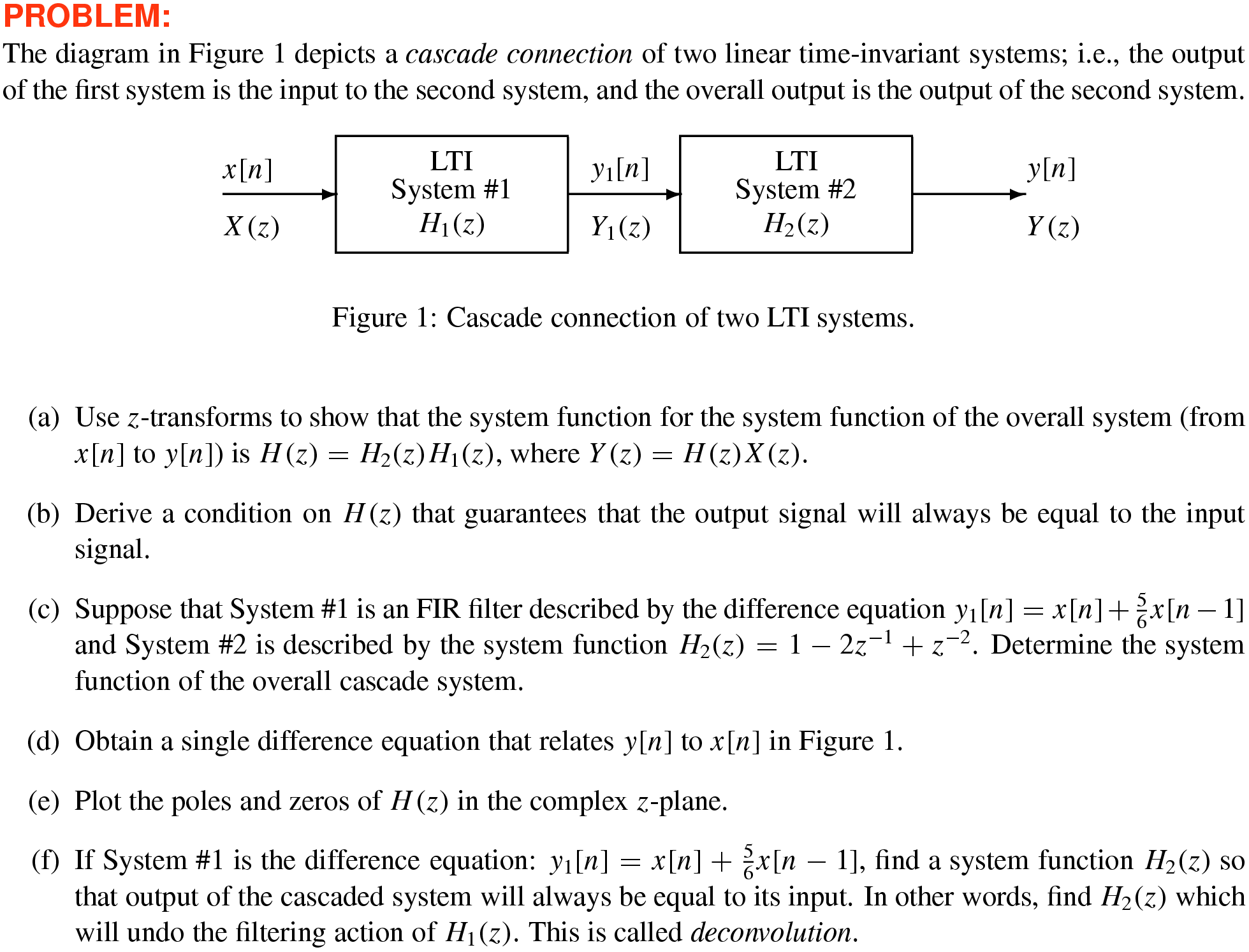
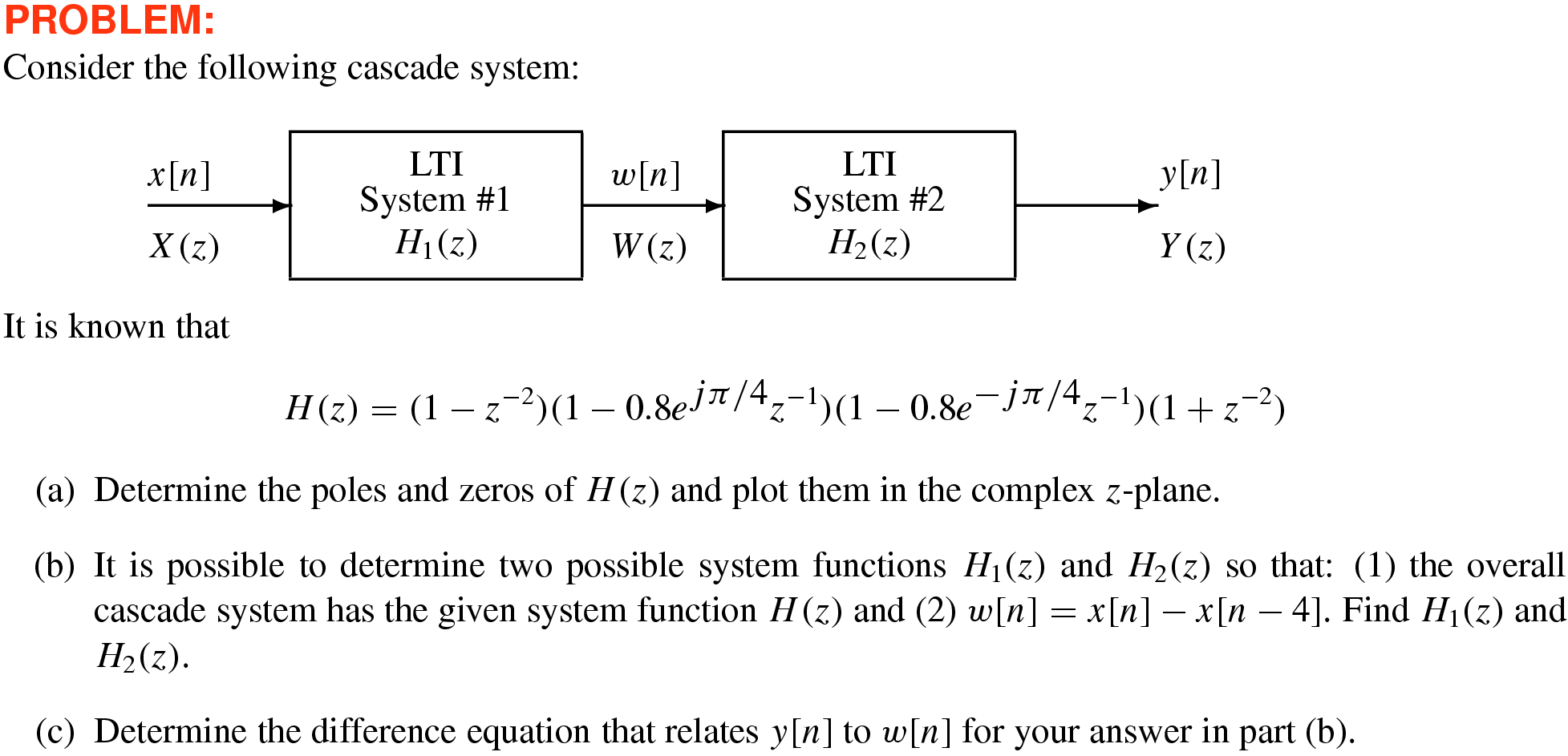
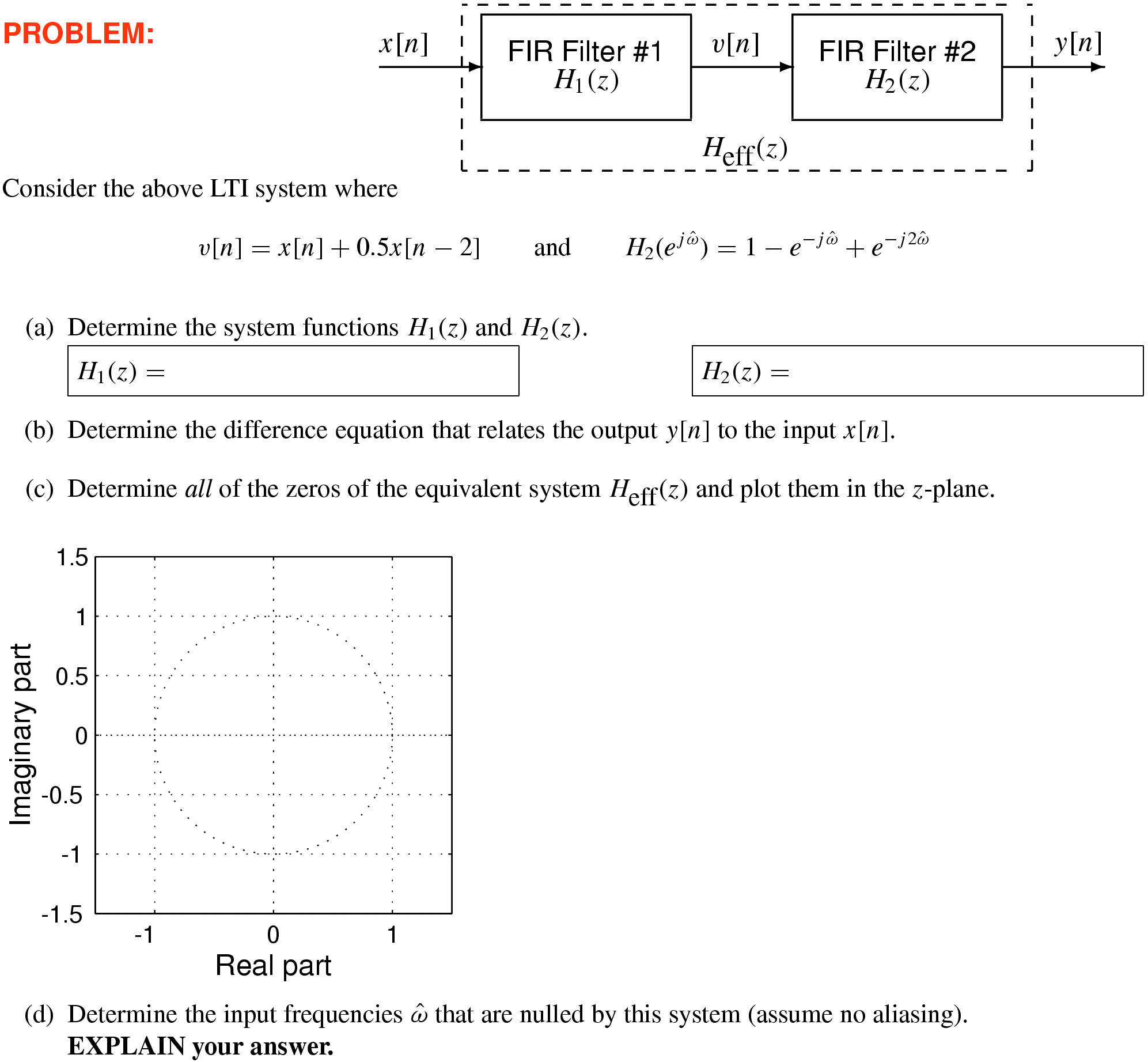
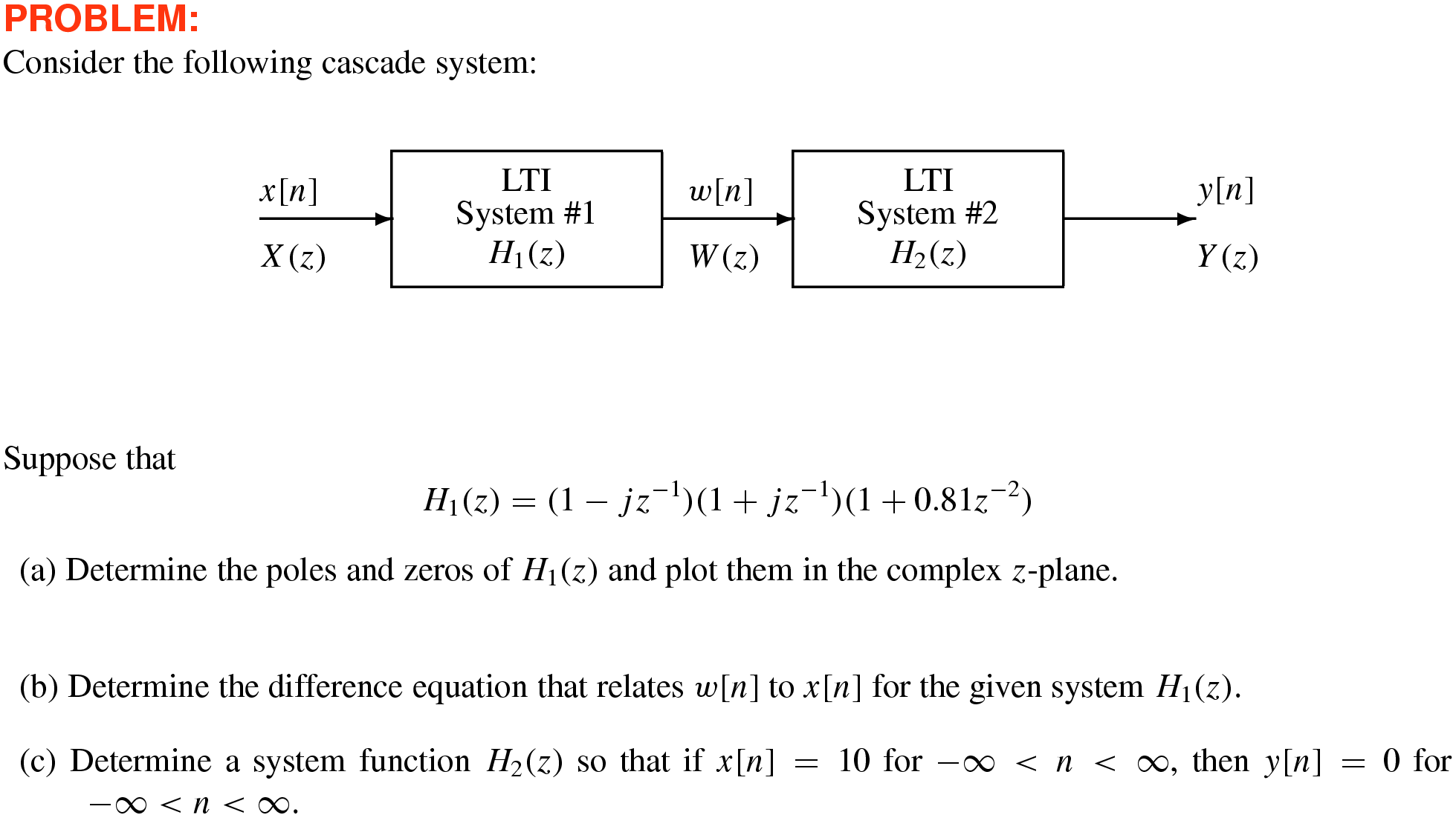
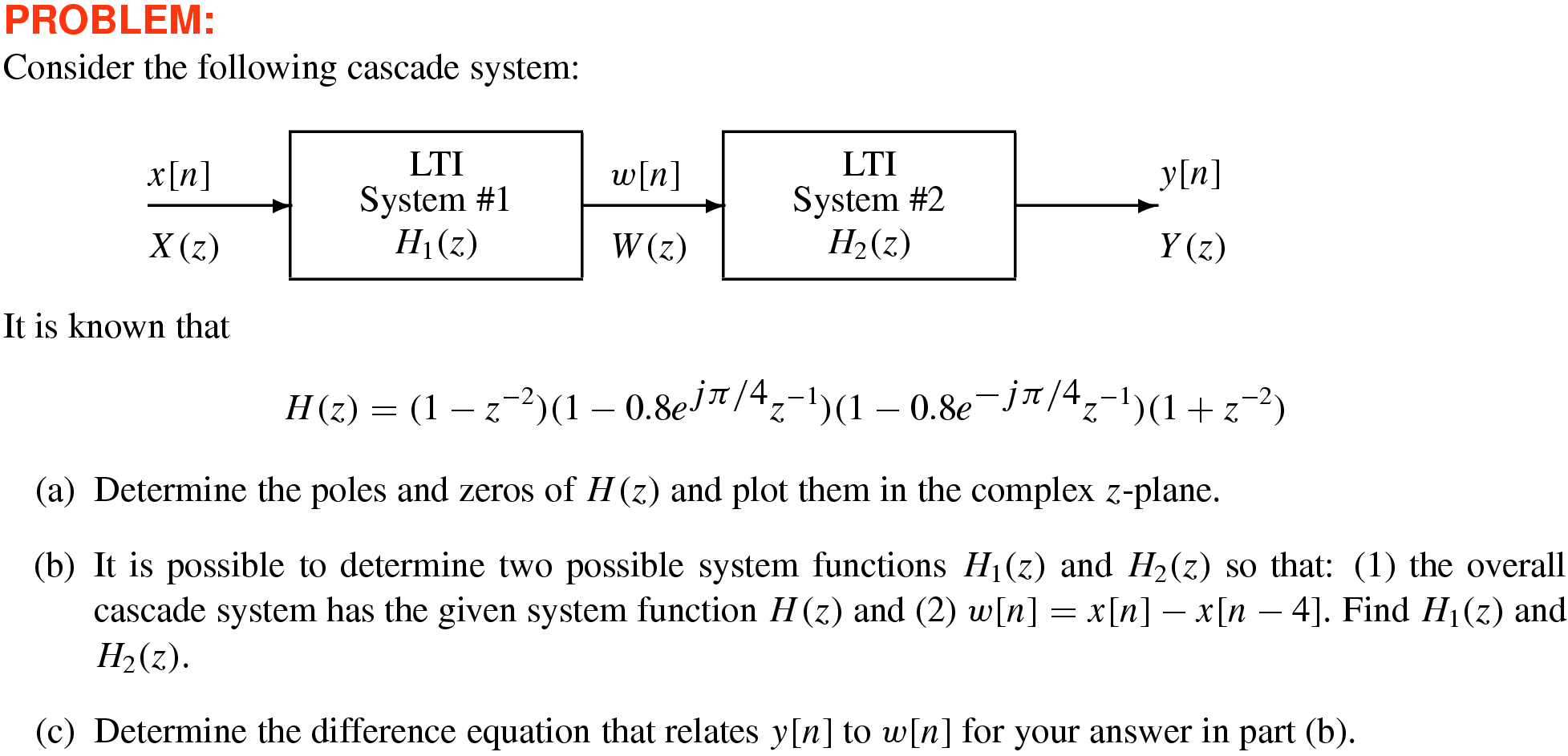
–5 Cascade of 2 FIR Systems ♦ \(H(z)\) ♦ Zeros ♦ Difference Equation
Solution
9
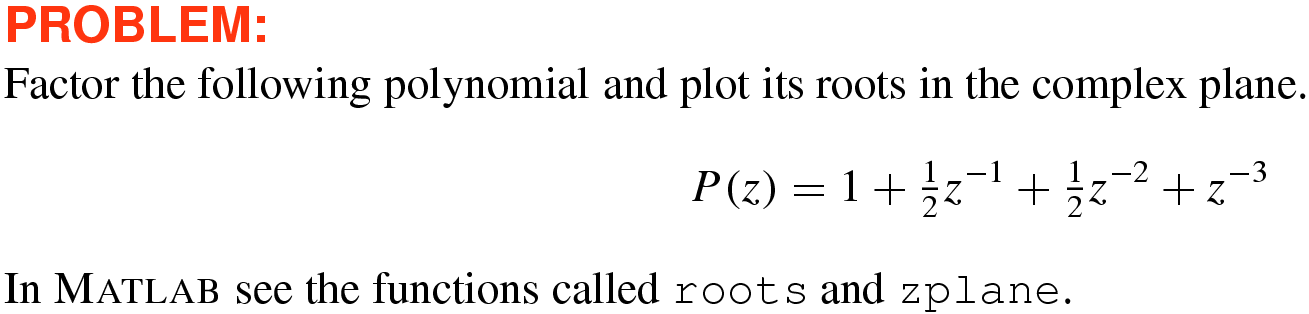
–6 Complex Roots of Polynomial ♦ Plot in \(z\mbox{-}\)Plane
Solution
9
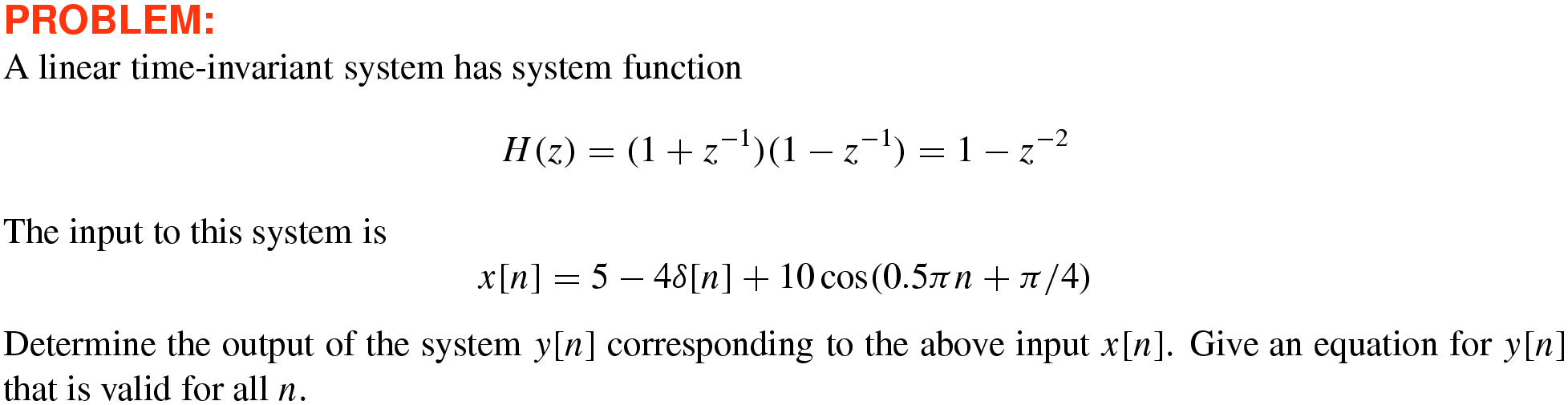
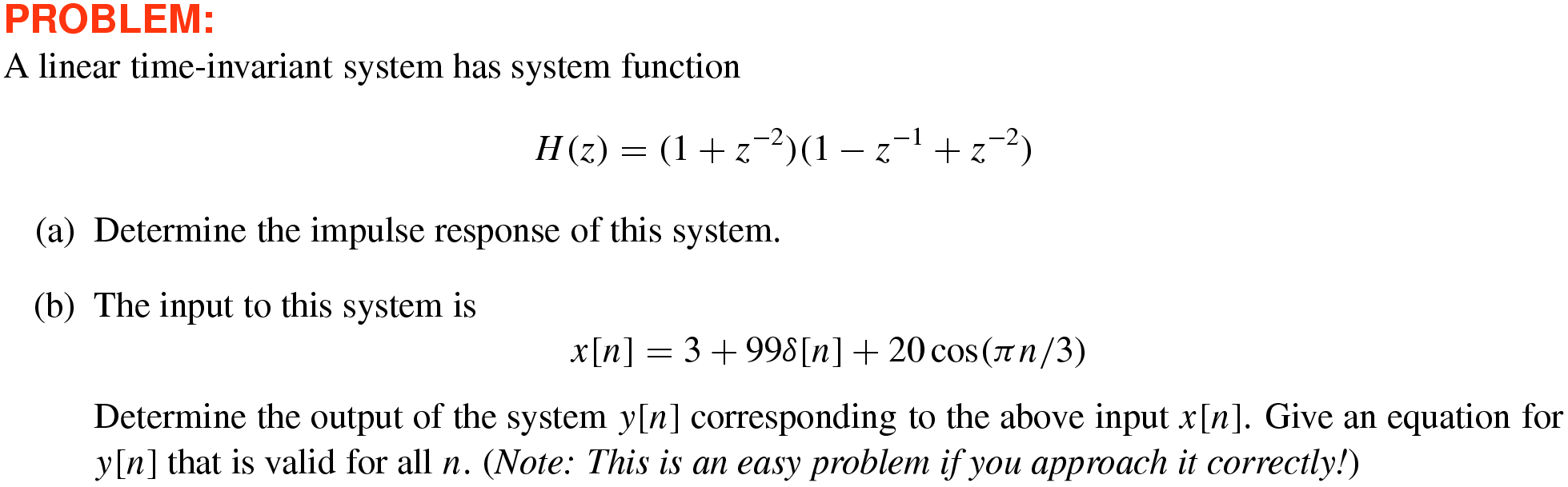
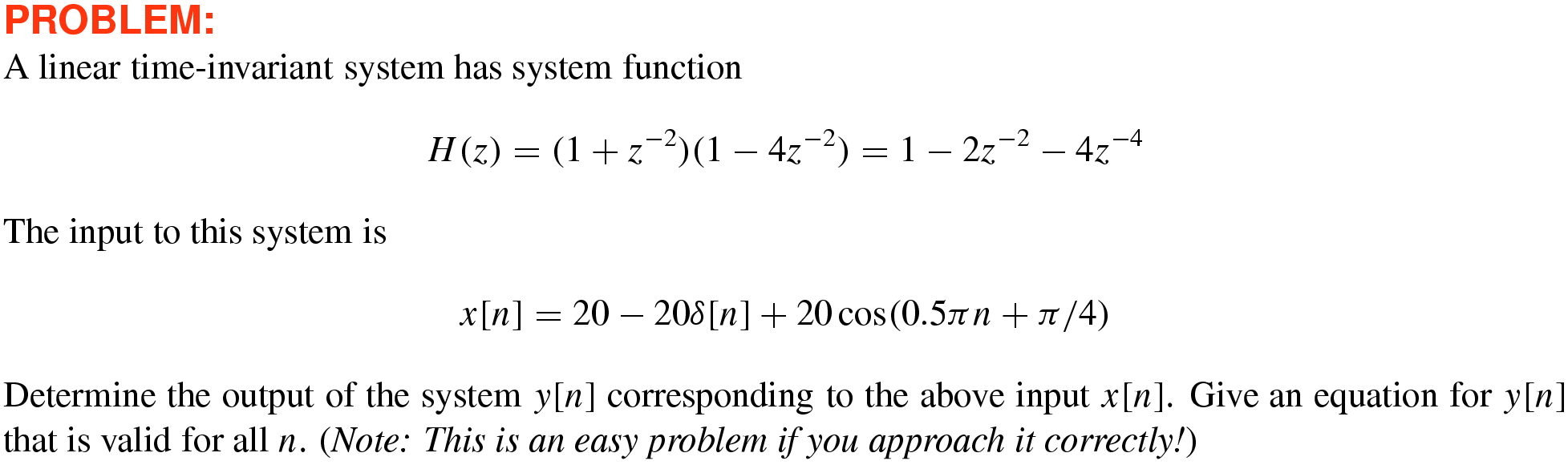
–7 Output Signal \(y[n]\) from FIR \(H(z)\) and Sinusoidal Input Signal \(x[n]\)
Solution
9
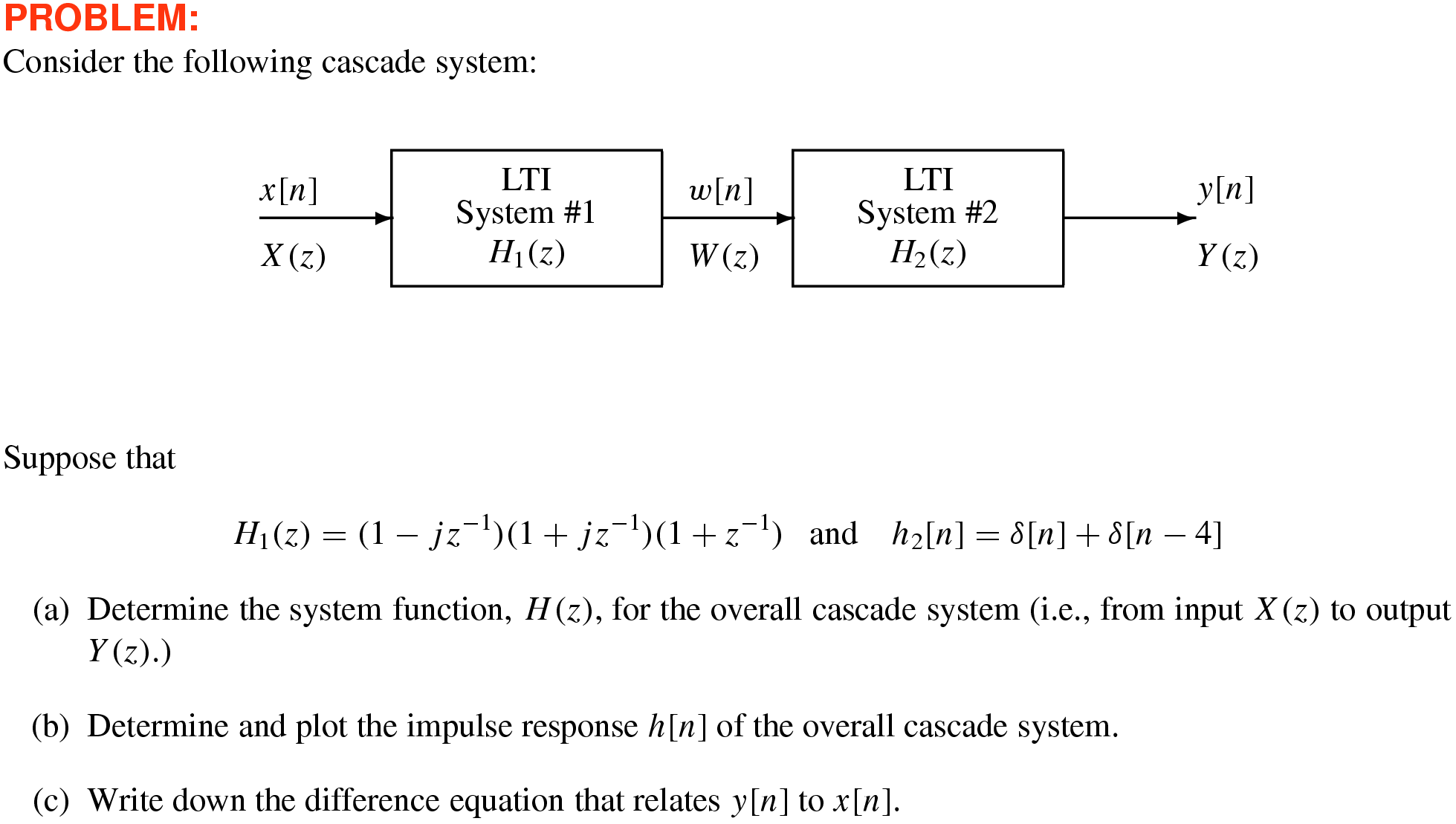
–8 Cascade of 2 FIR Systems ♦ \(H(z)\) ♦ Zeros ♦ Difference Equation
Solution
9
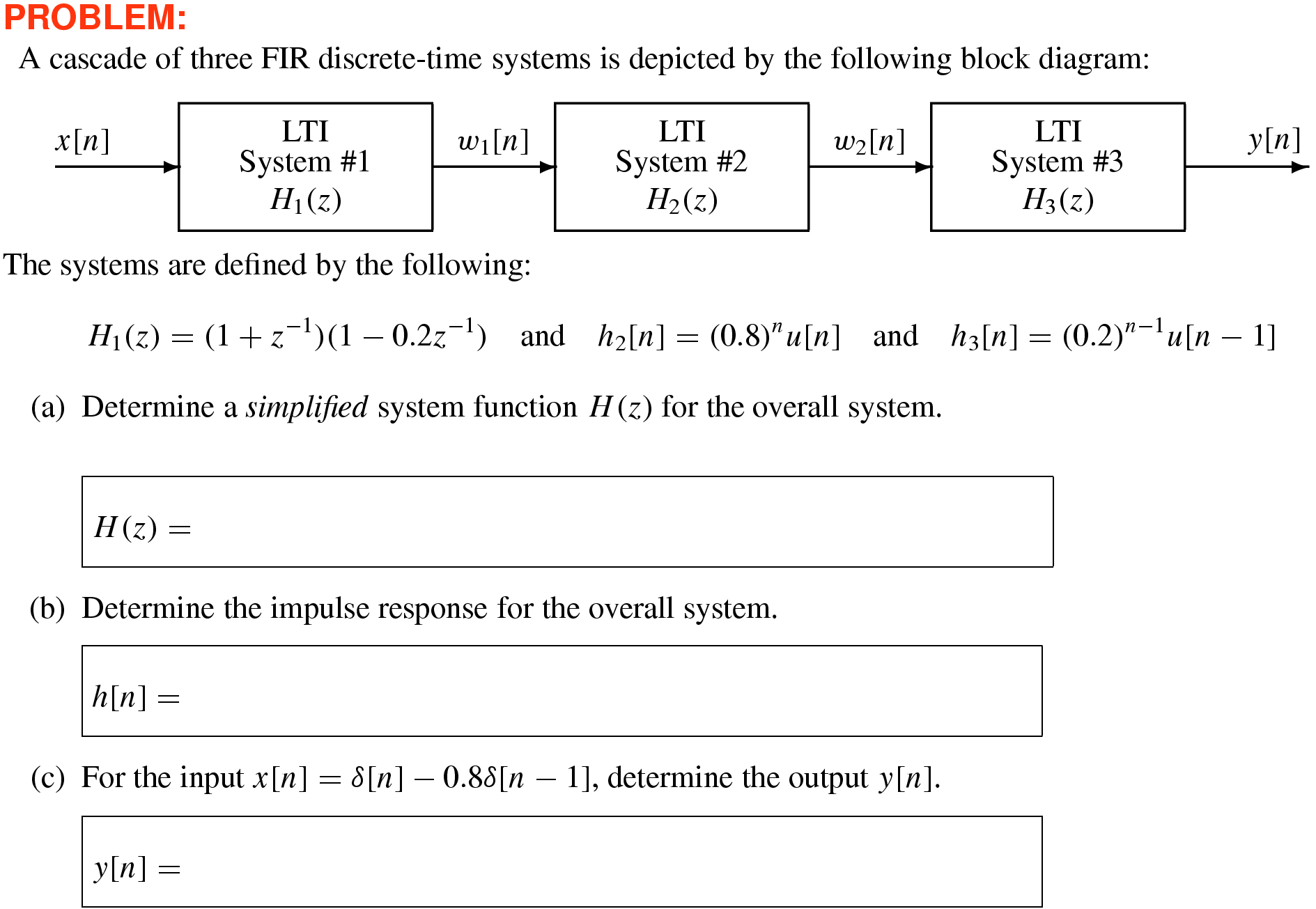
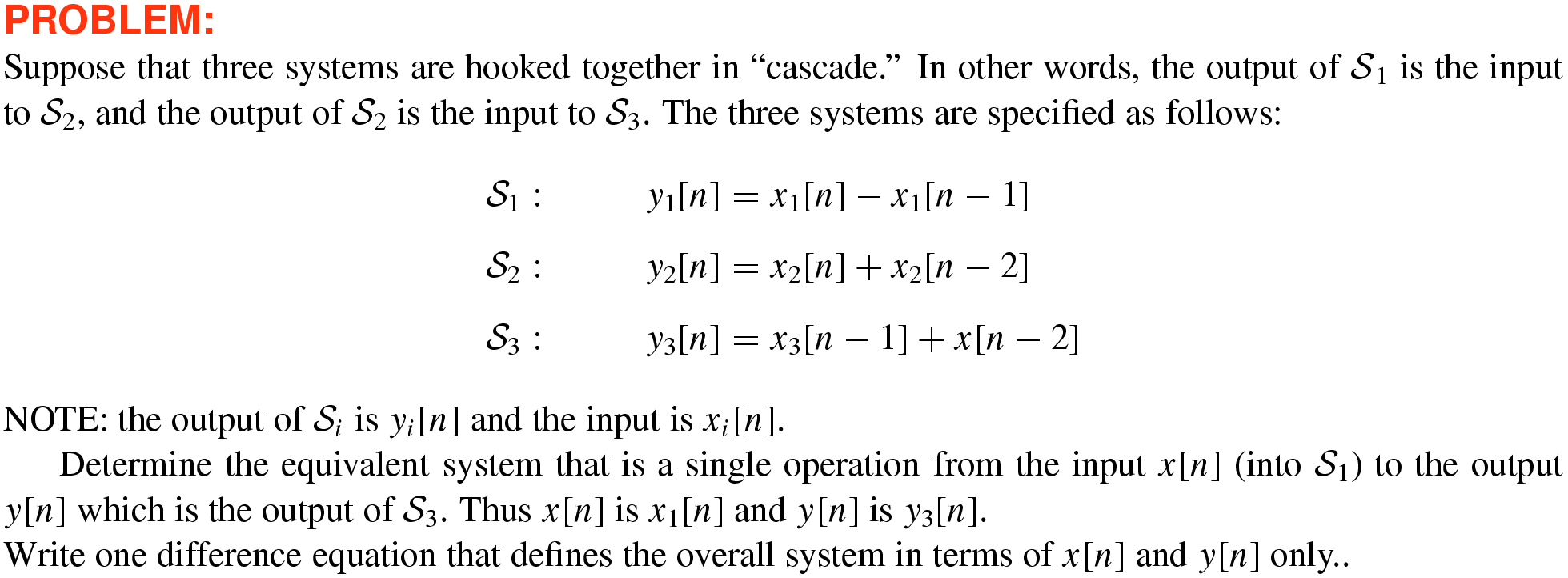
–9 Cascade of 3 FIR Systems: Obtain Overall Difference Equation
Solution
9
–10 Output Signal \(y[n]\) from FIR \(H(z)\) and Sinusoidal Input Signal \(x[n]\)
Solution
9
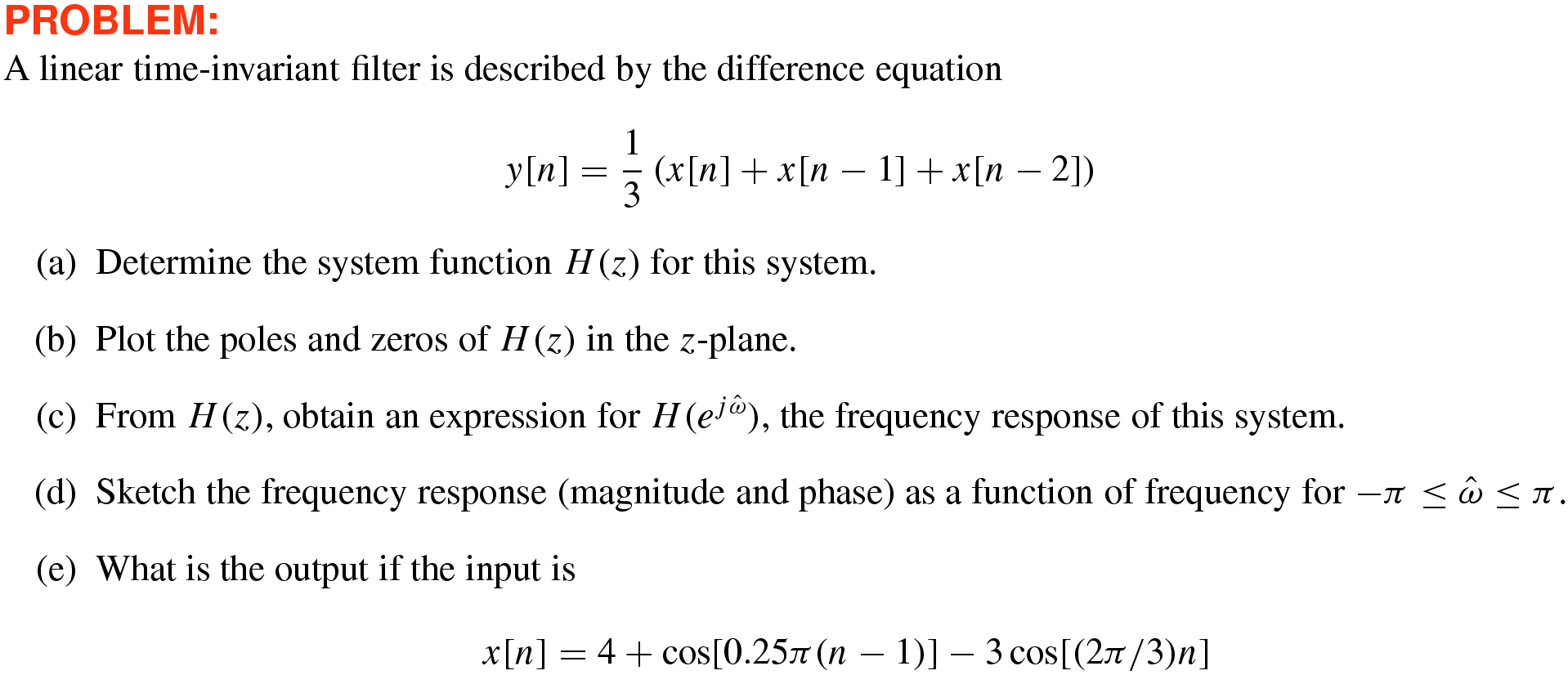
–11 \(H(z)\) for FIR Filter ♦ Zeros ♦ Frequency Response ♦ Impulse Response \(h[n]\)
Solution
9
–12 Cascade of 2 FIR Systems ♦ \(H(z)\) ♦ Difference Equation ♦ Impulse Response \(h[n]\)
Solution
9
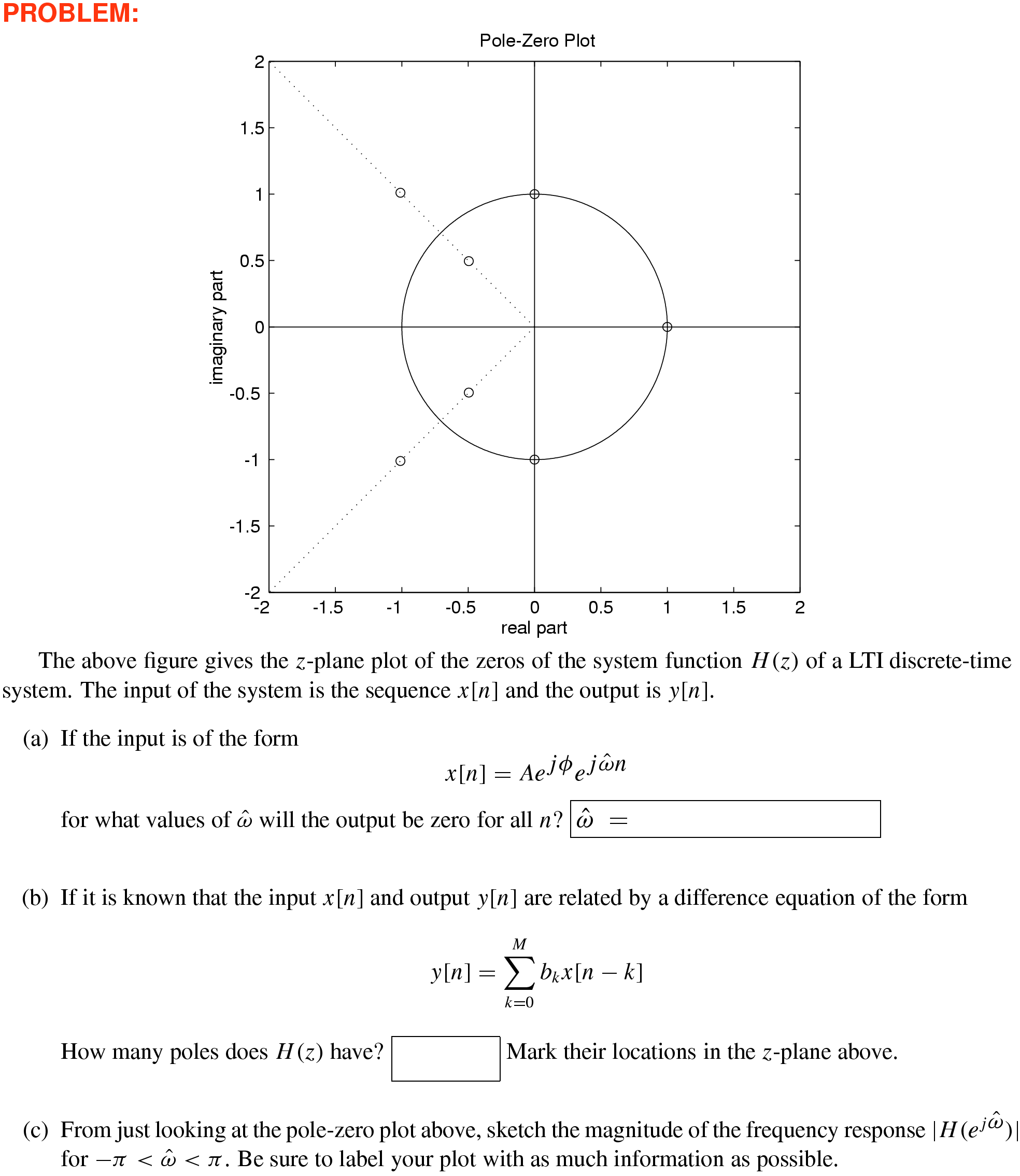
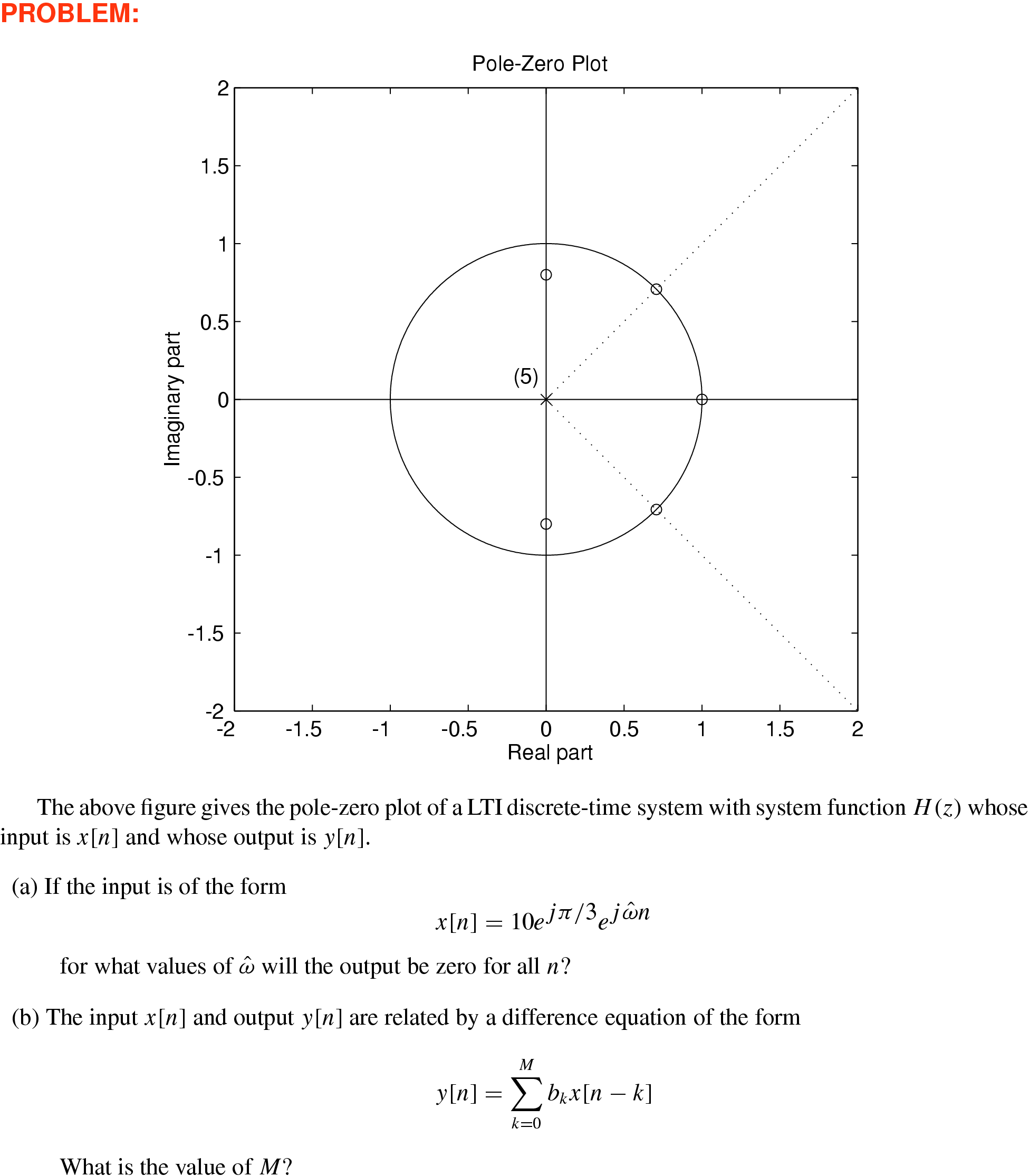
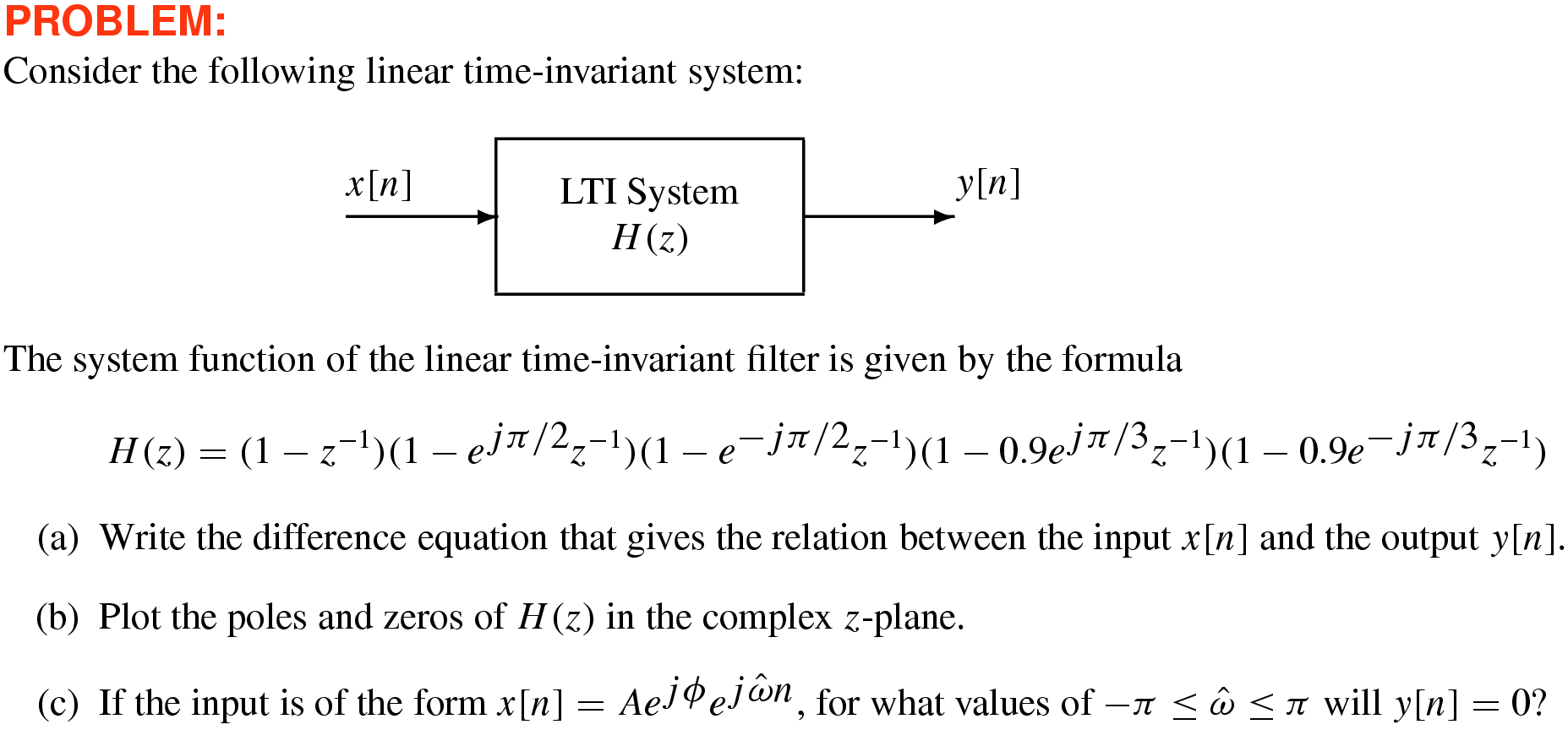
–13 Pole-Zero Plot for \(H(z)\) ♦ Nulling Sinusoidal Inputs ♦ Sketch Frequency Response
Solution
9
–14 System Functions and Frequency Response
Solution
9
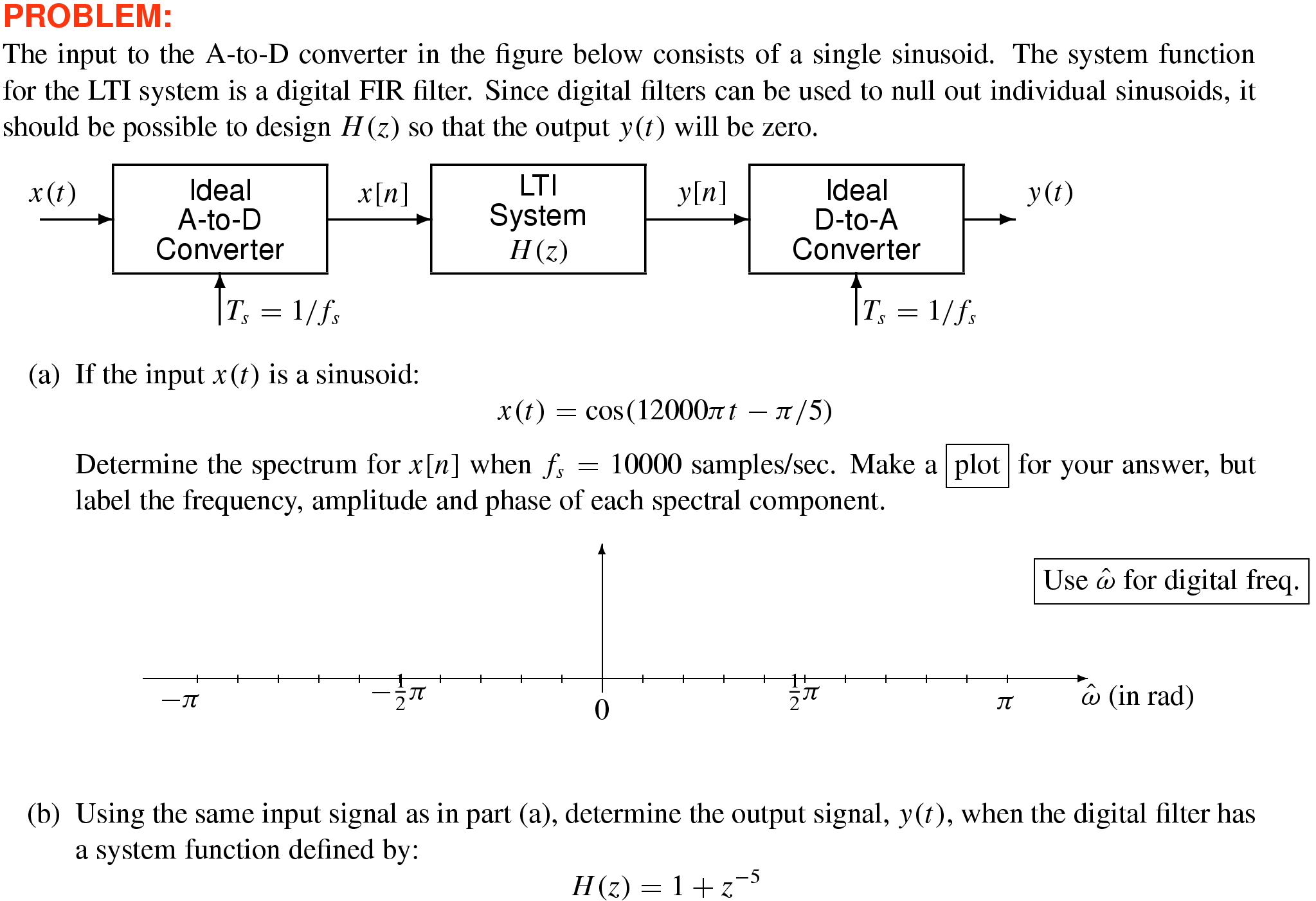
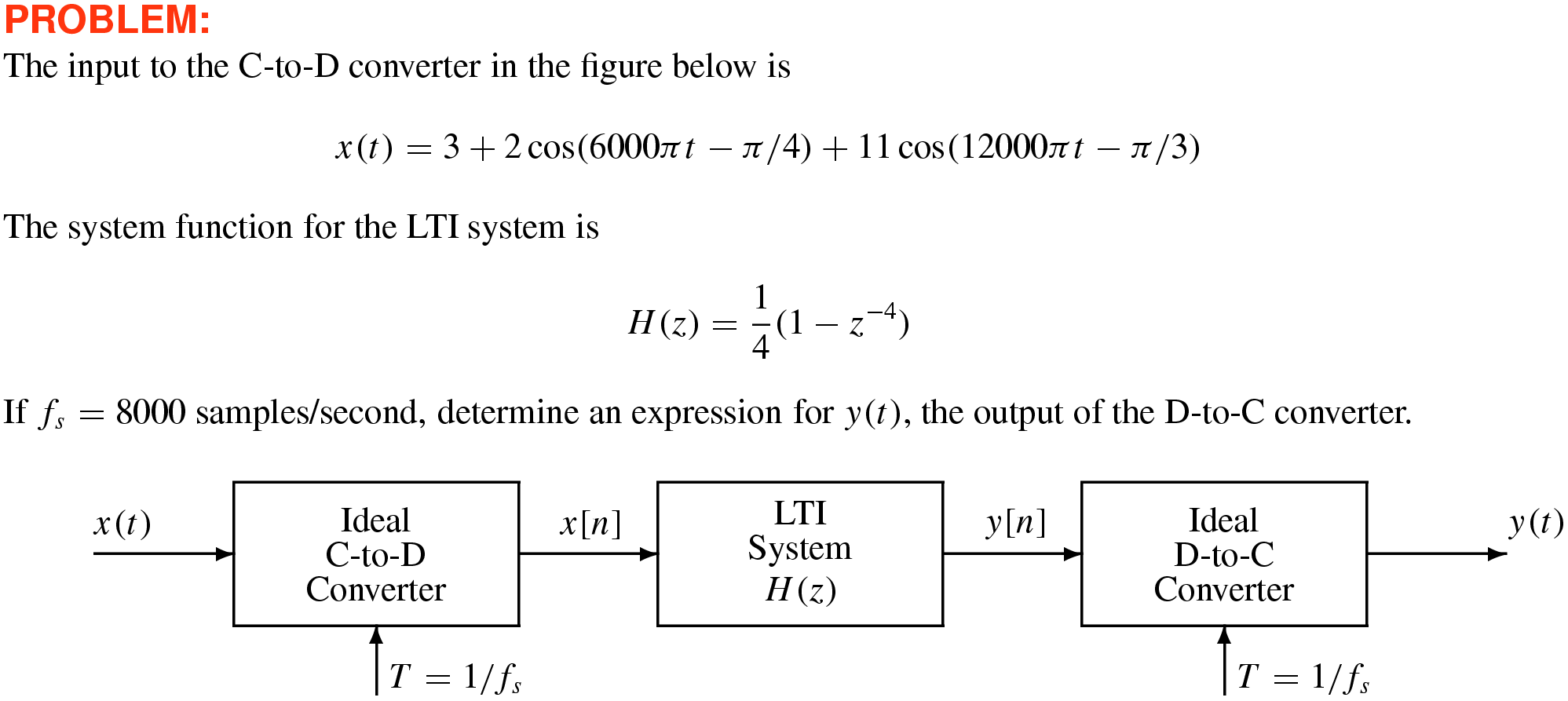
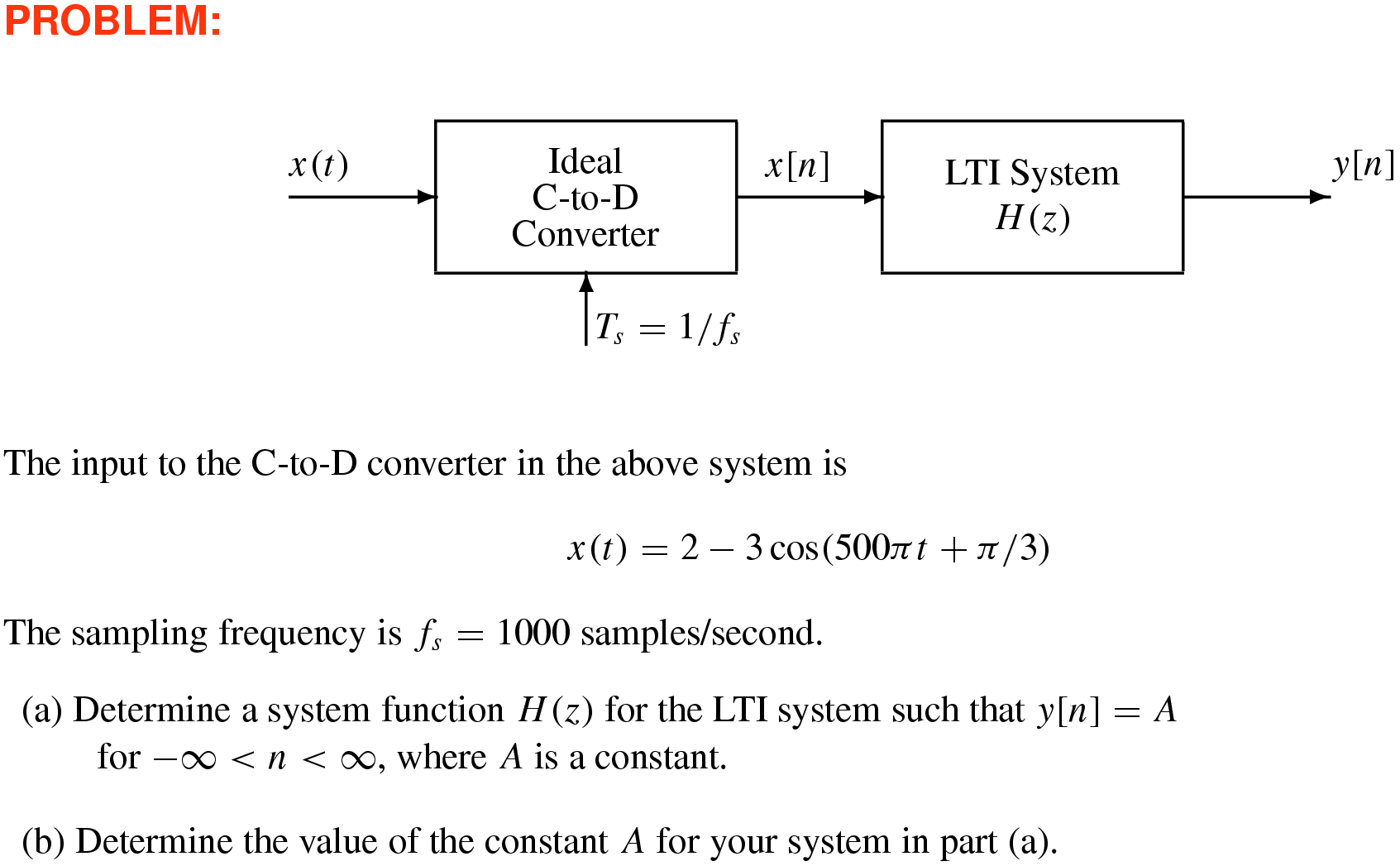
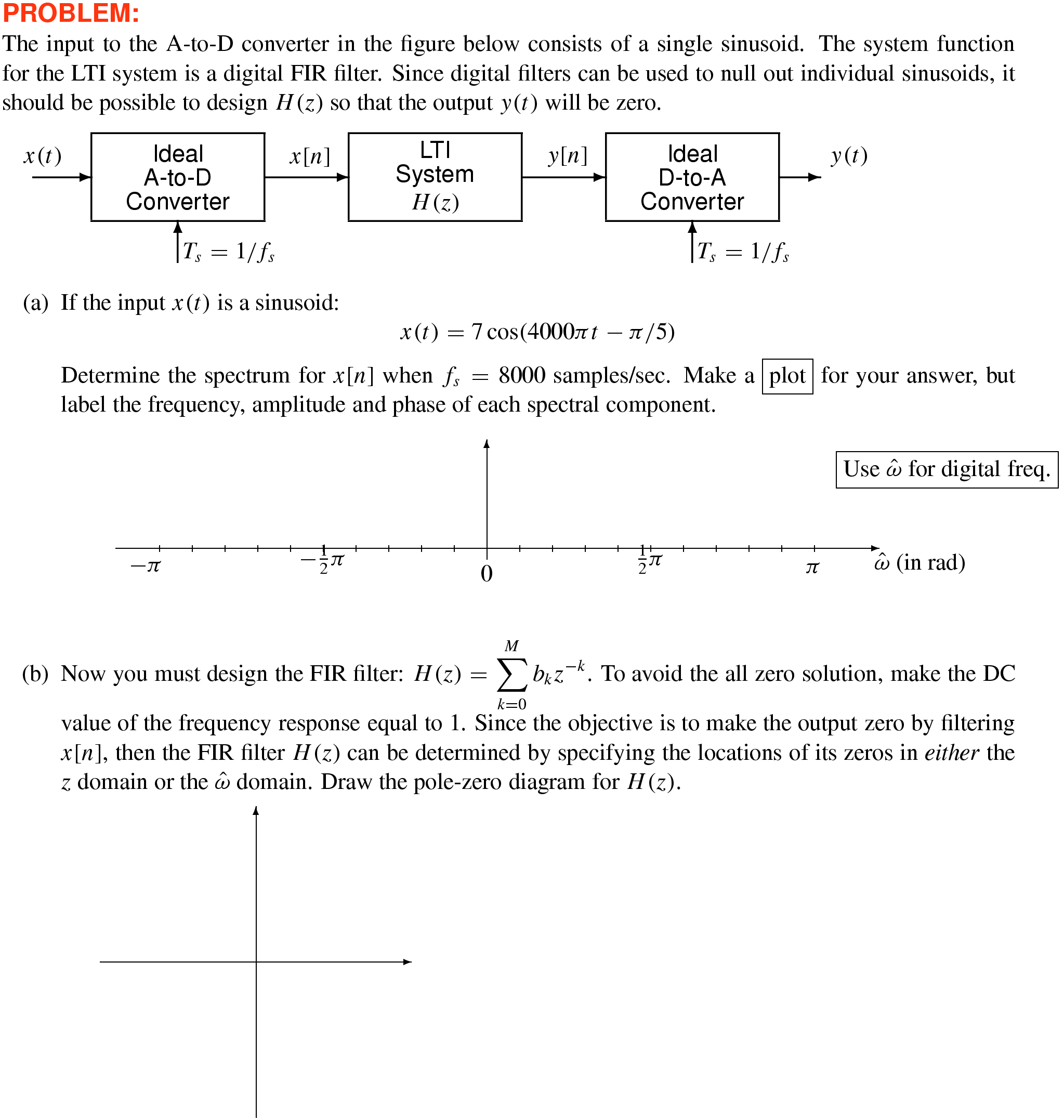
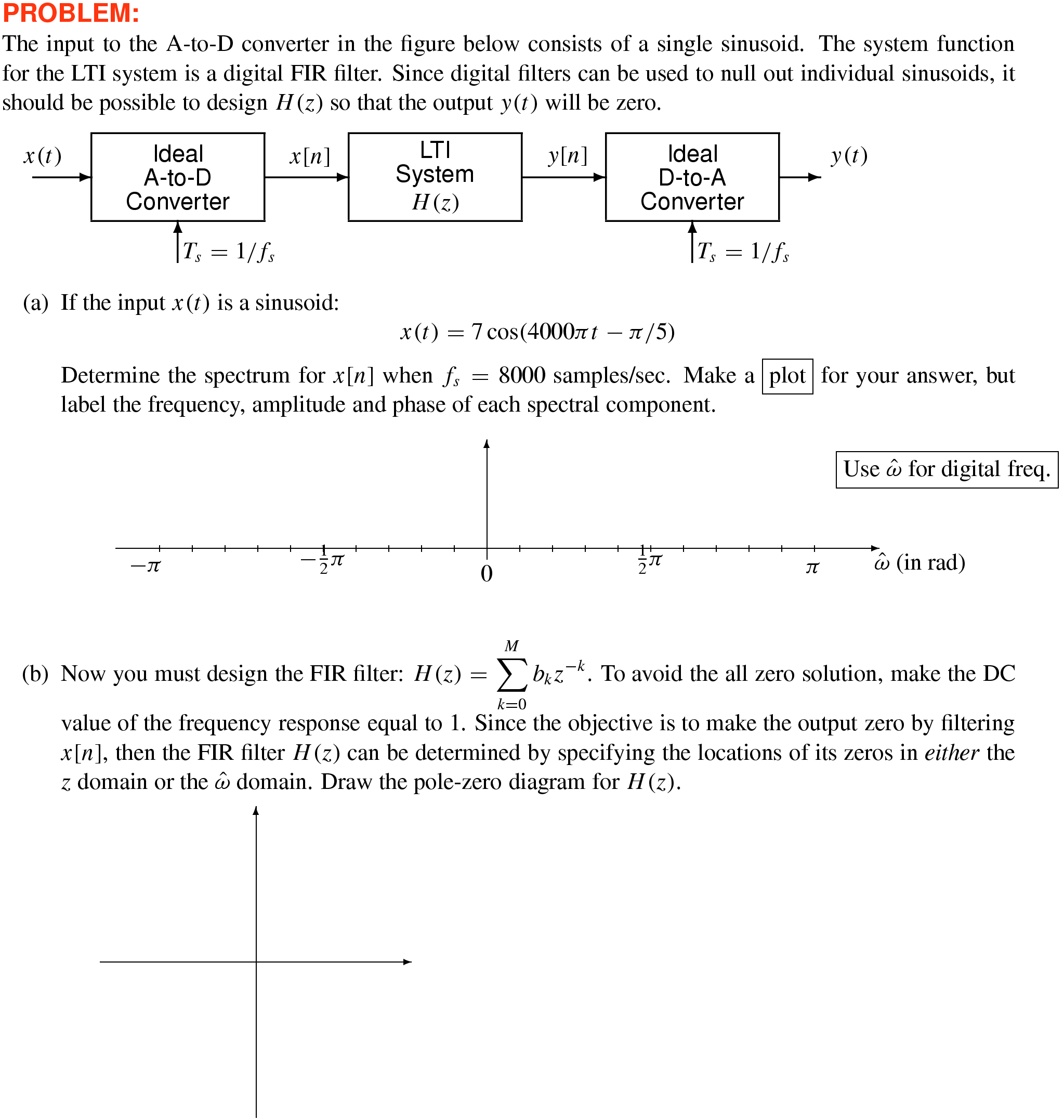
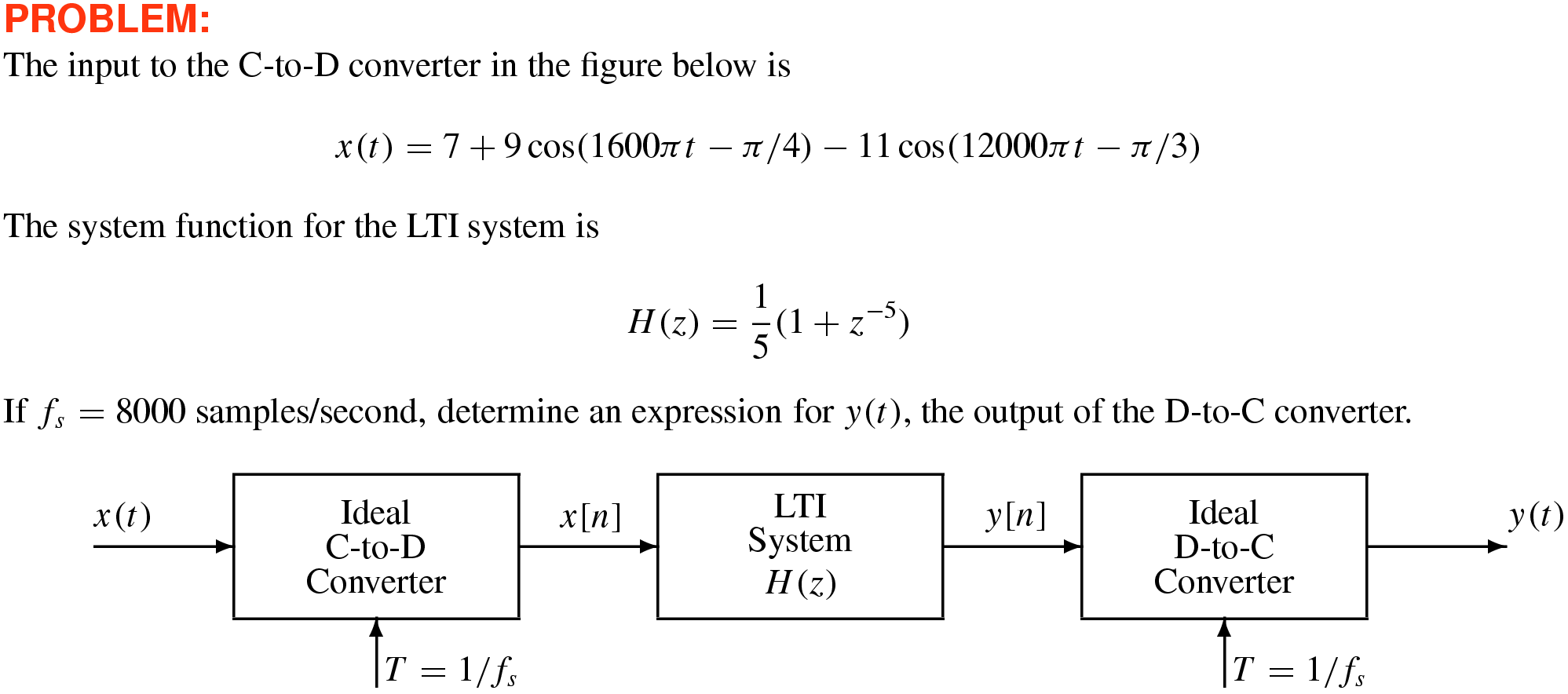
–15 Discrete-Time Filtering of a Continuous-Time Signal
Solution
9
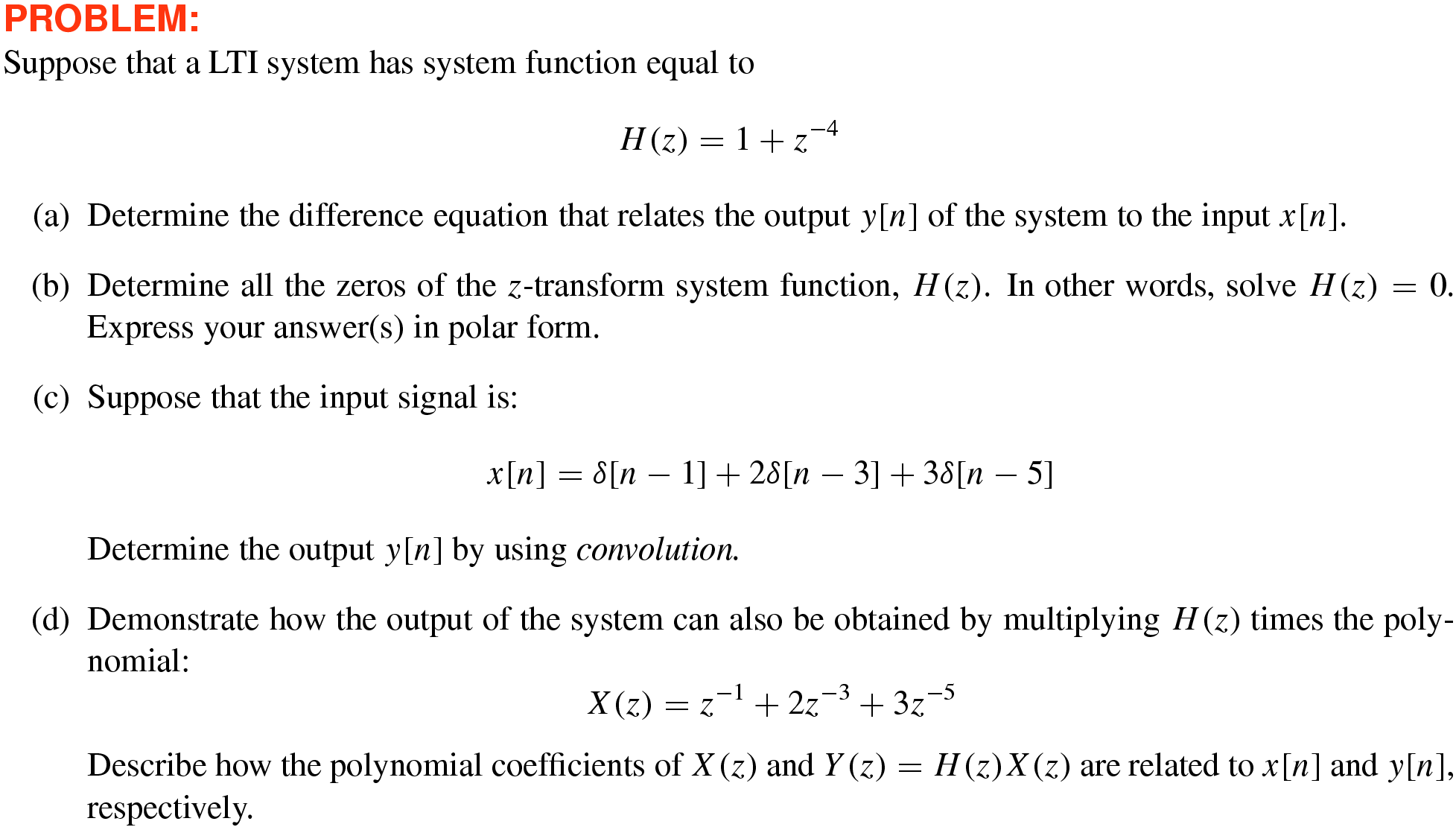
–16 FIR Difference Equation from System Function
9
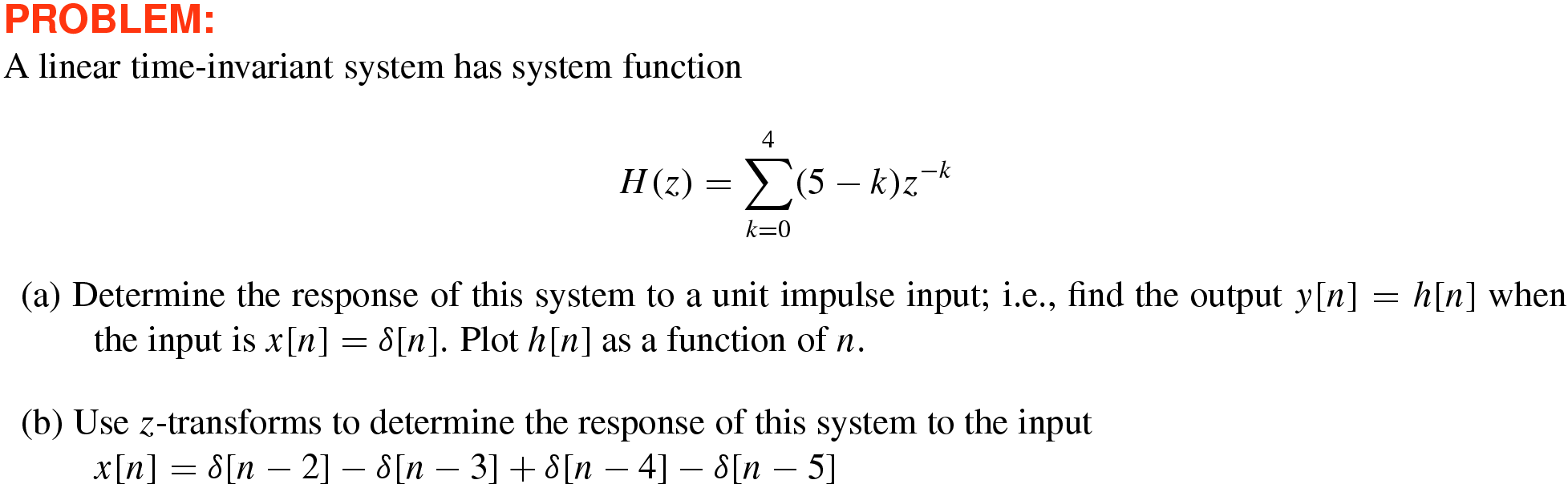
–17 \(H(z)\) and output signal for FIR Filter
9
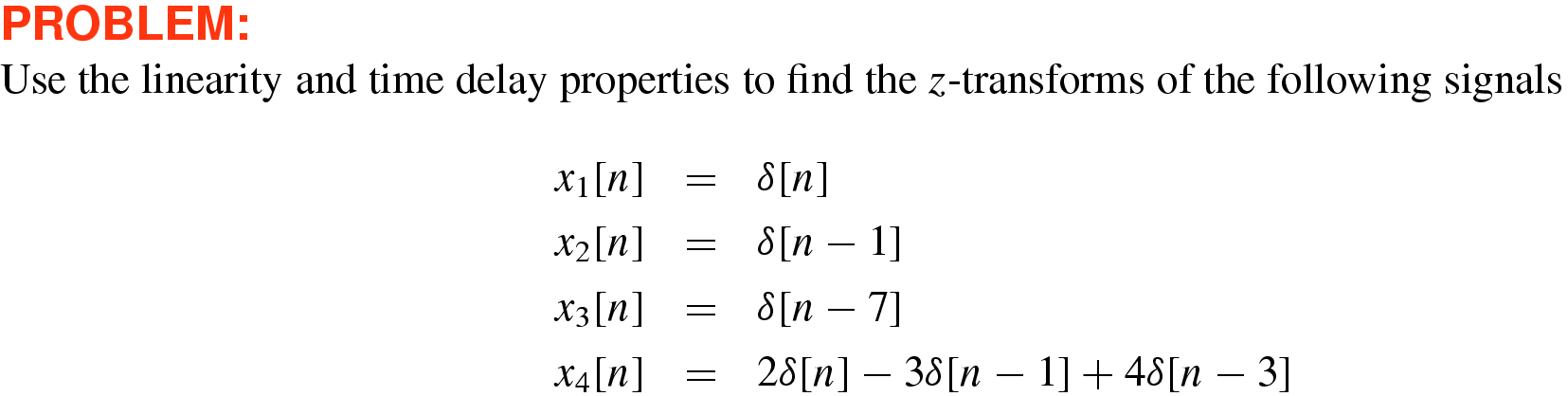
–18 Compute \(z\mbox{-}\)Transforms of shifted impulses
9
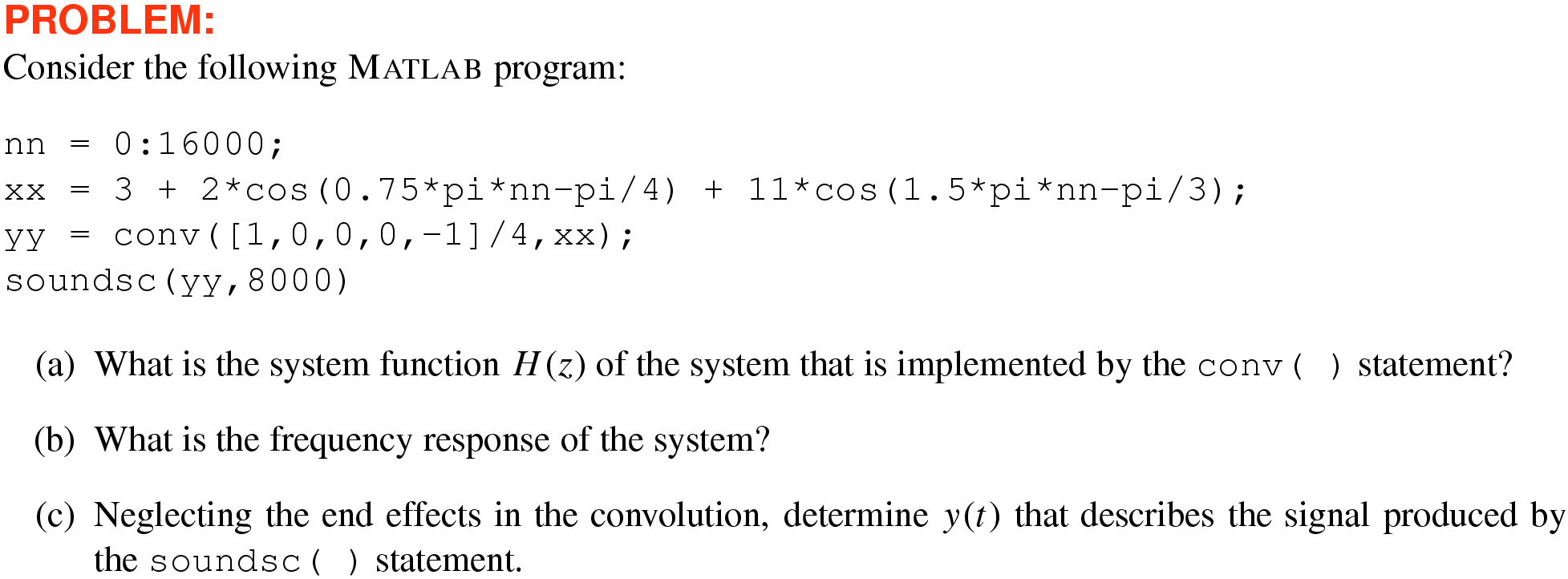
–19 Filtering Sinusoids Using MATLAB
9
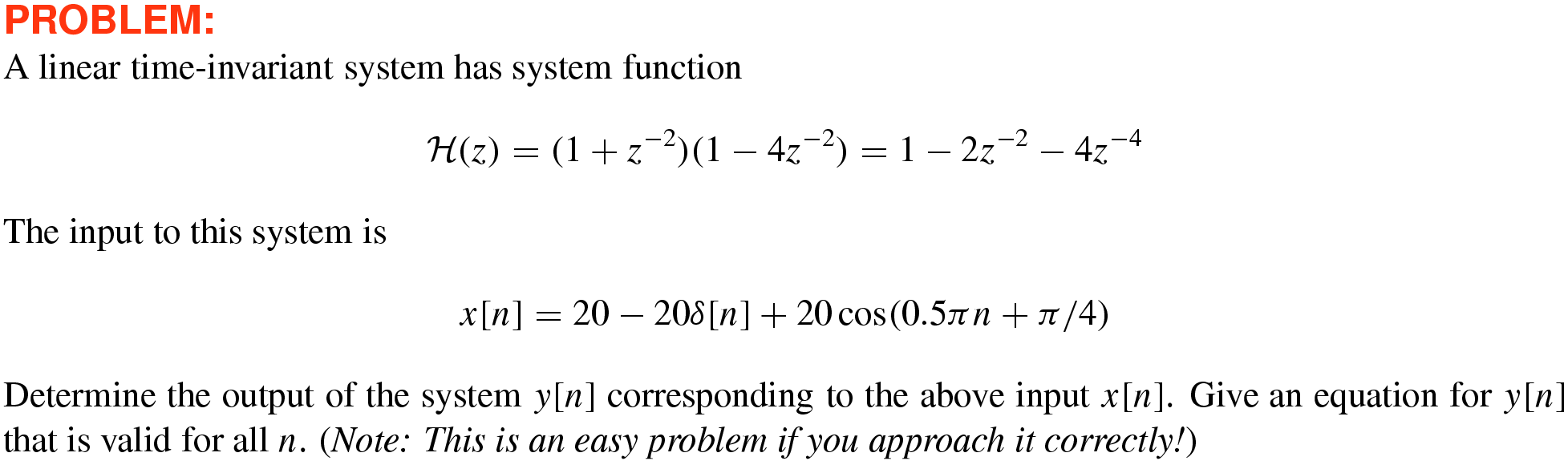
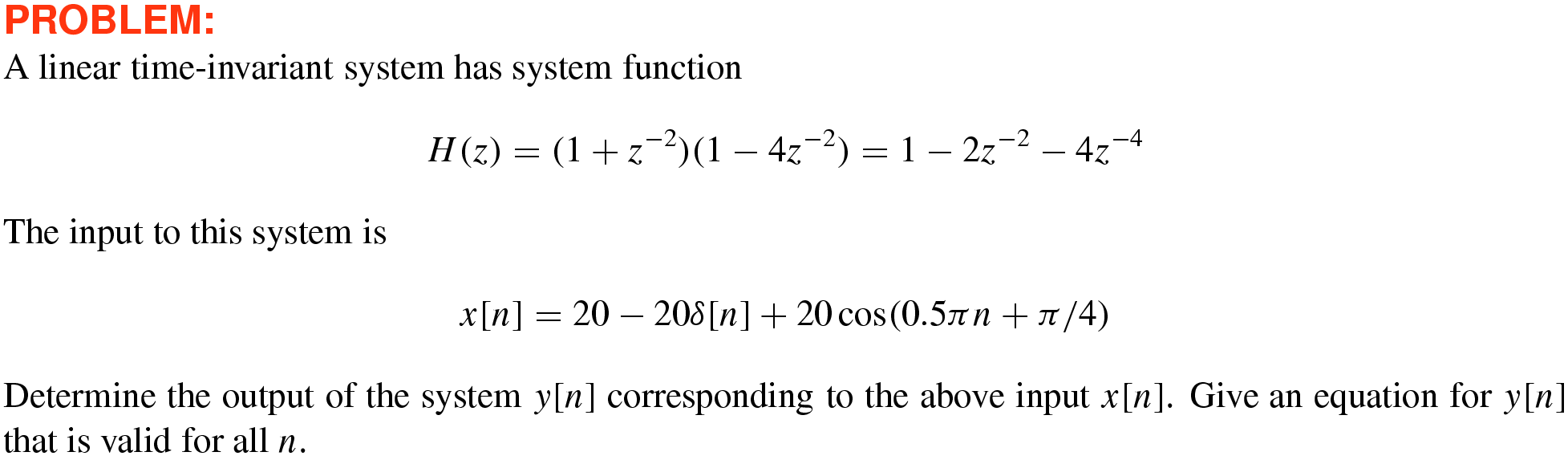
–20 Find Ouput of LTI System Function
9
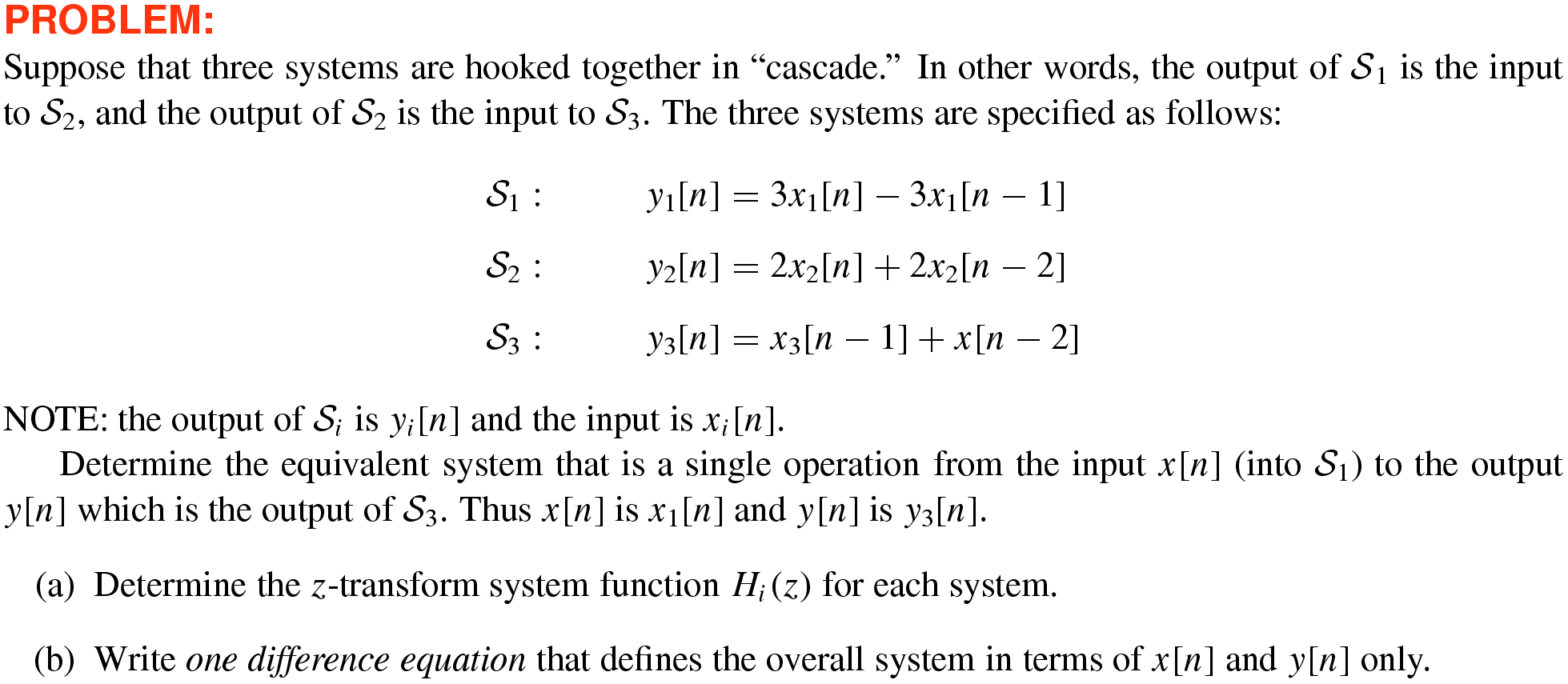
–21 \(H(z)\) and Difference Equation for Cascade of 3 FIR Systems
9
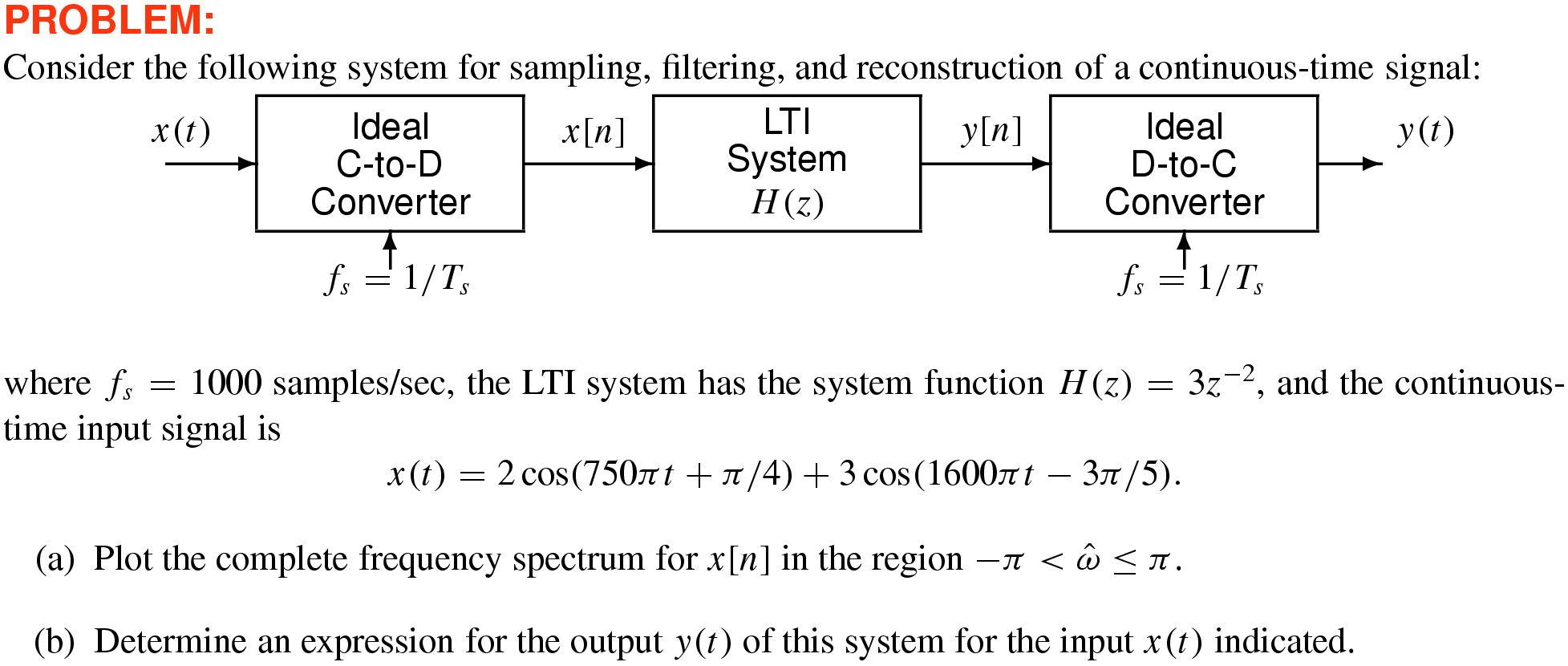
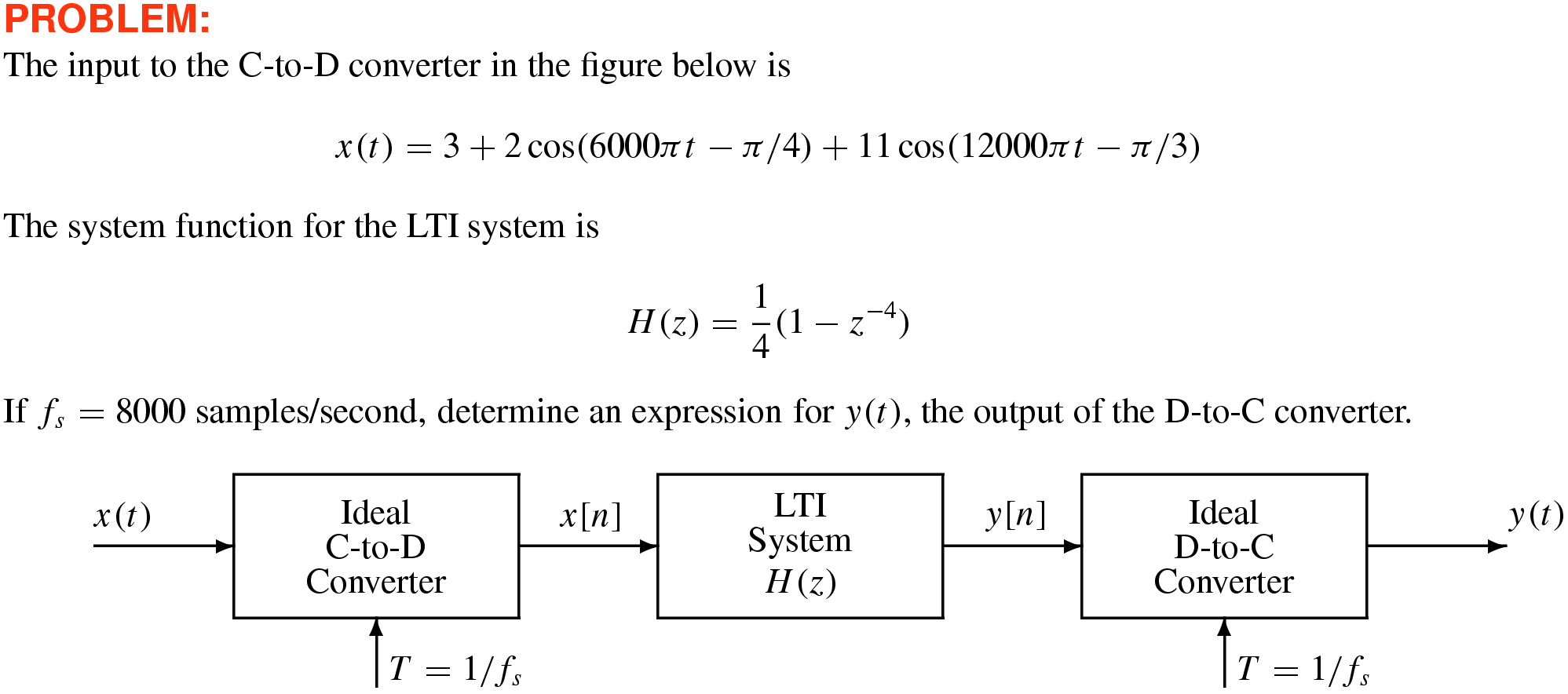
–22 Discrete-Time Processing of Continuous-Time Signals
9
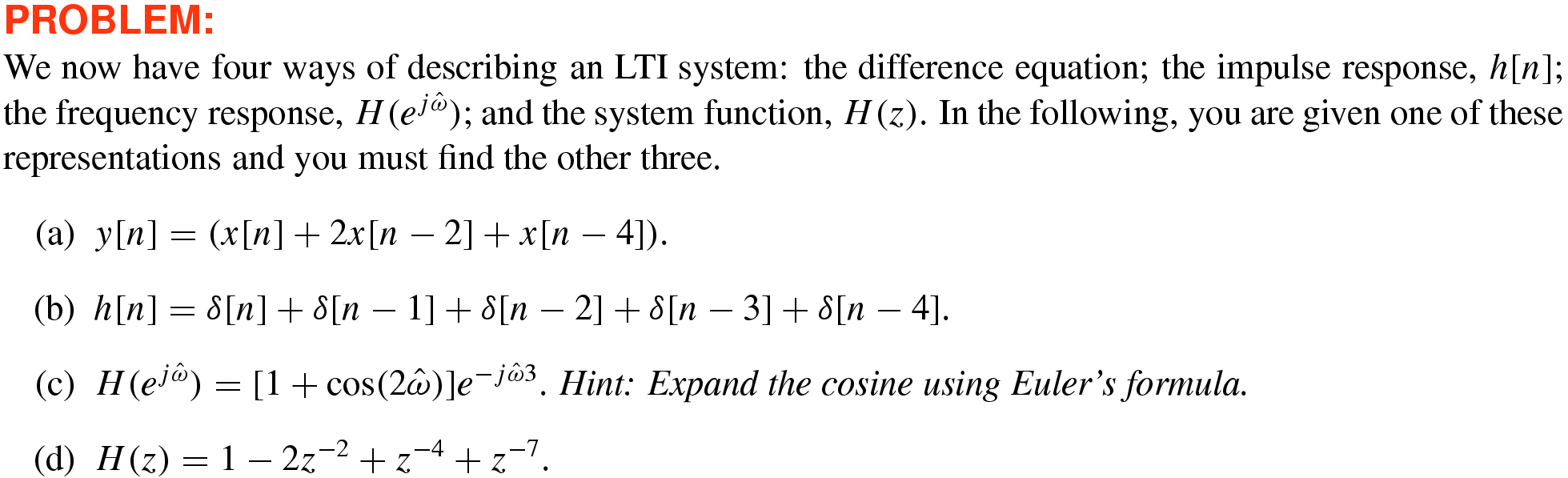
–23 Different descriptions of an FIR system
Solution
9
–24 3 domains from MATLAB code
Solution
9
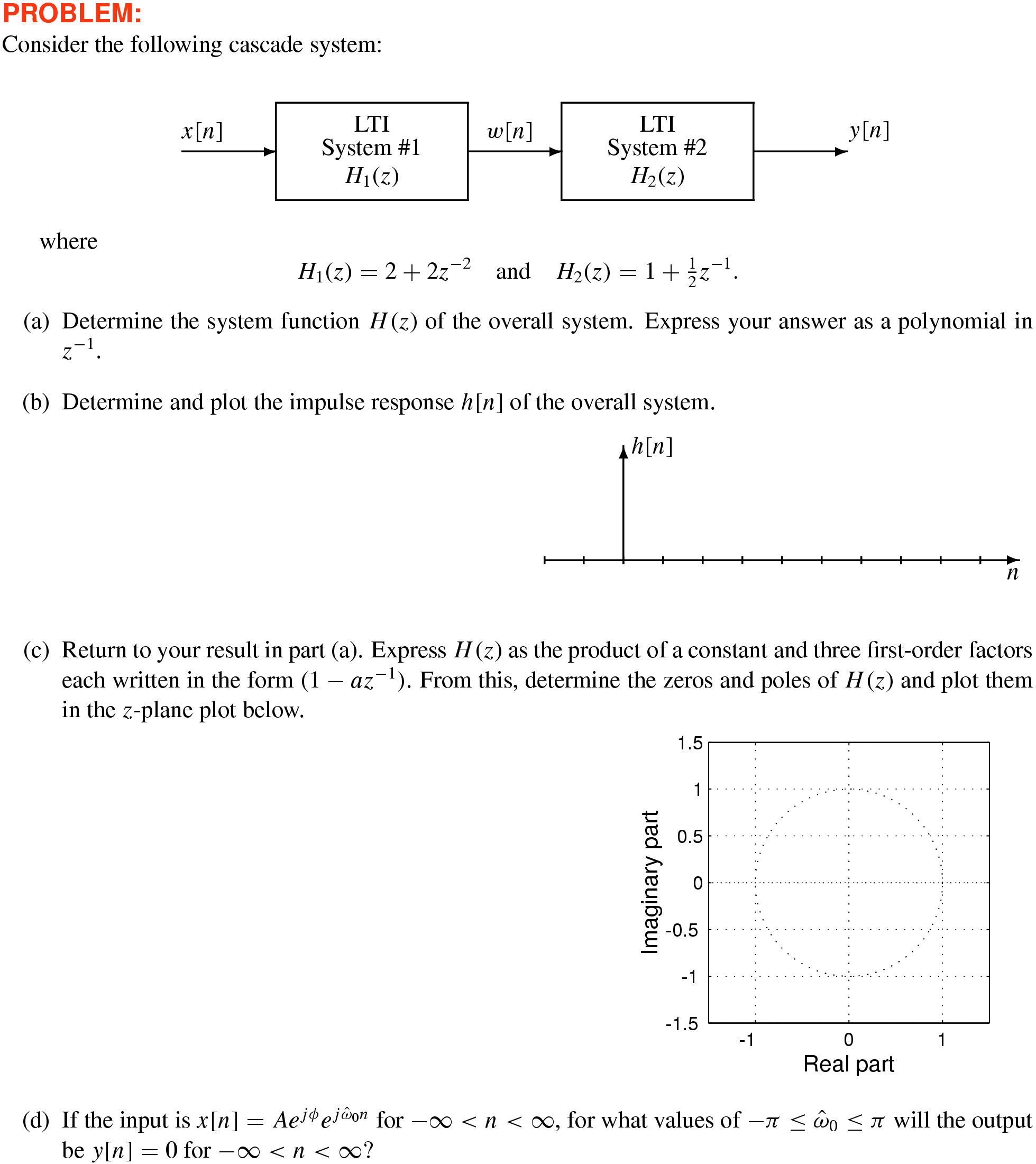
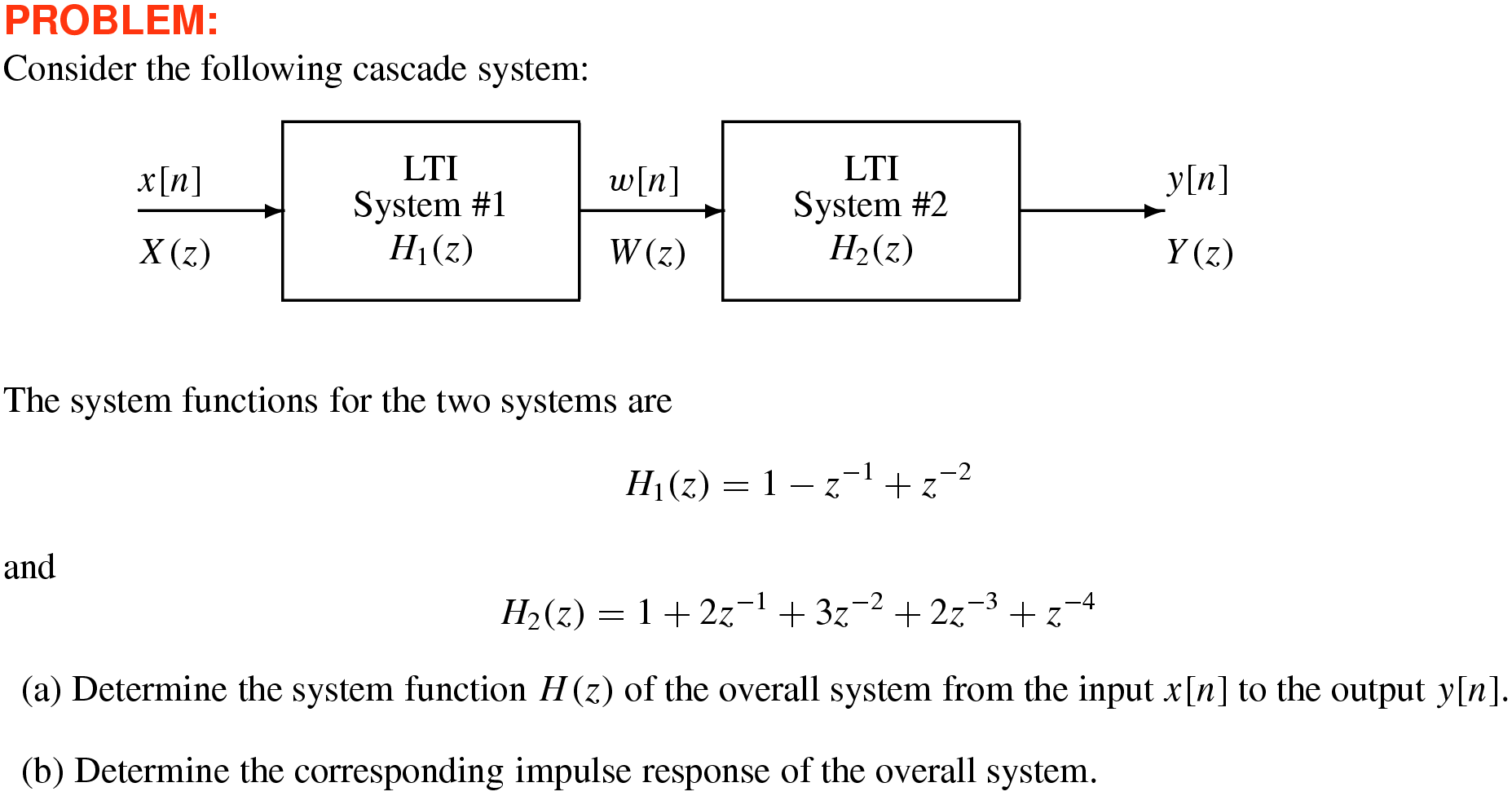
–25 \(H(z)\) for cascaded systems
Solution
9
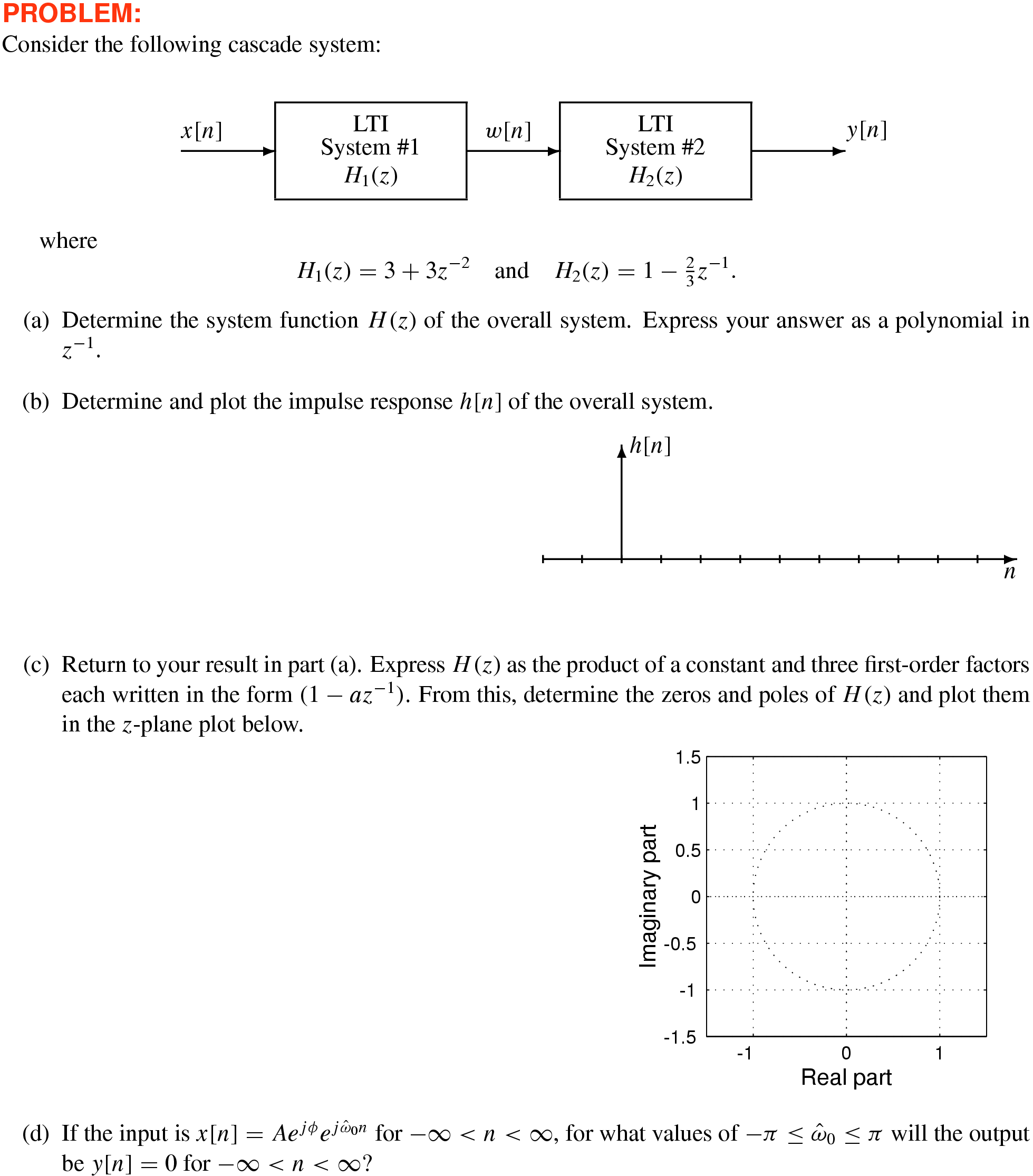
–26 \(H(z)\) for cascaded systems
Solution
9
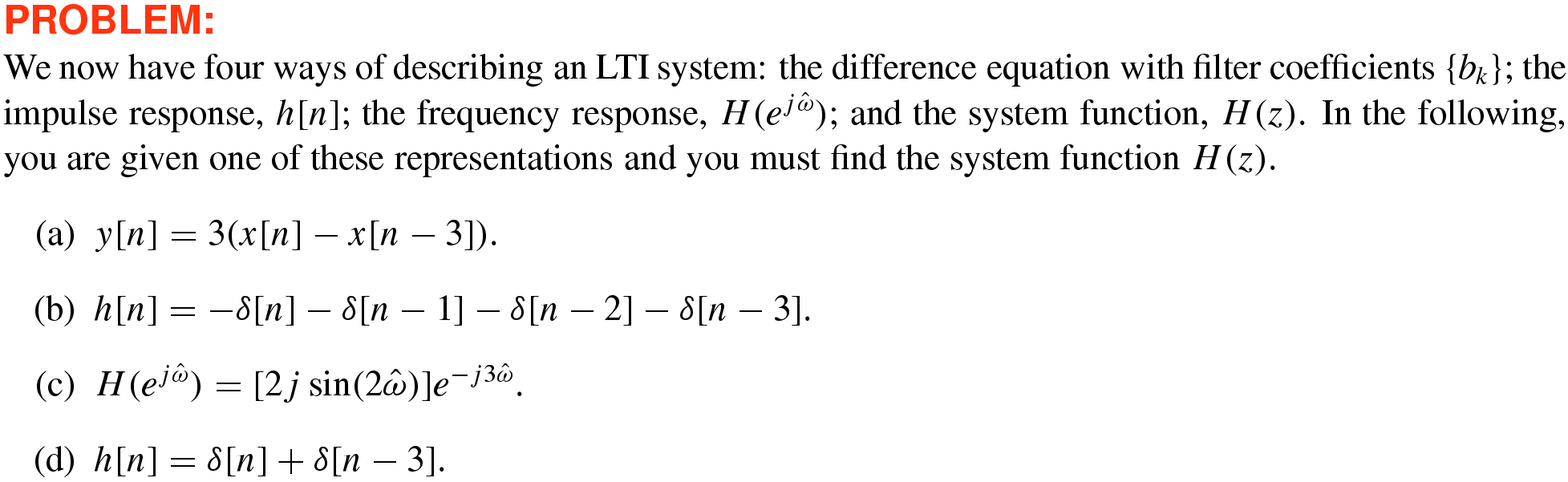
–27 Find the System Function \(H(z)\) Given Other System Descriptions
Solution
9
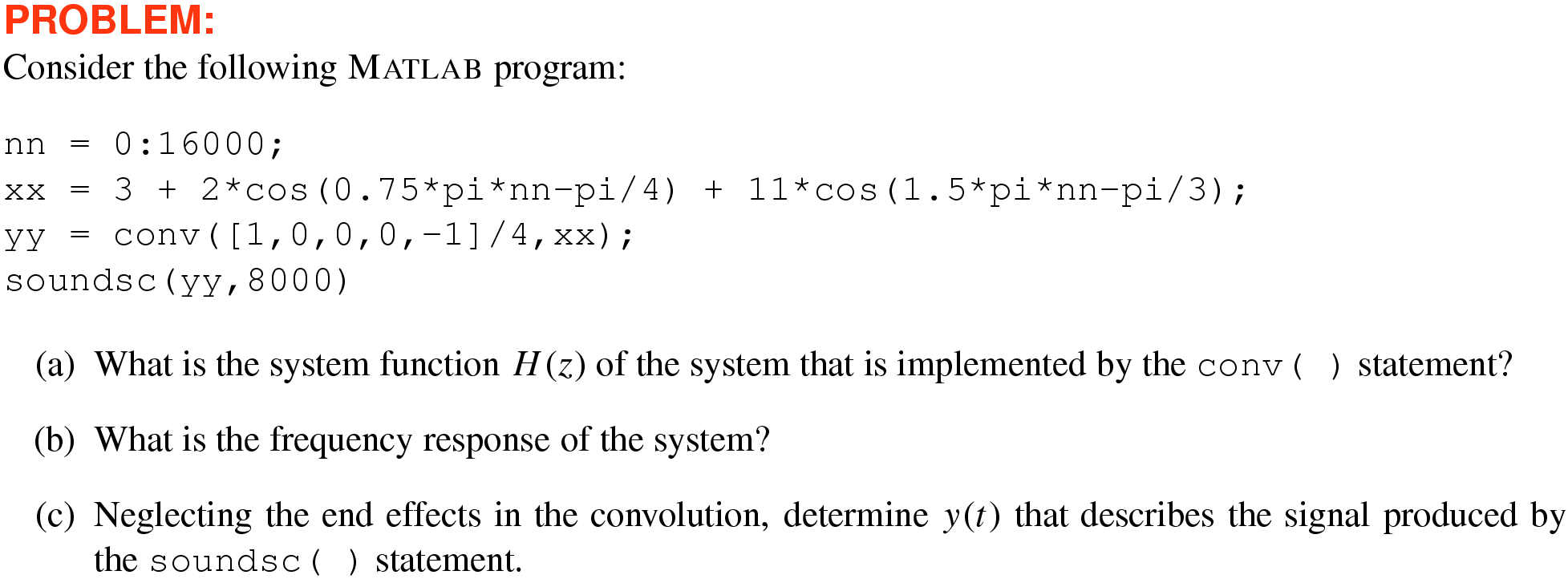
–28 Analyze a System Defined by a MATLAB Program
9
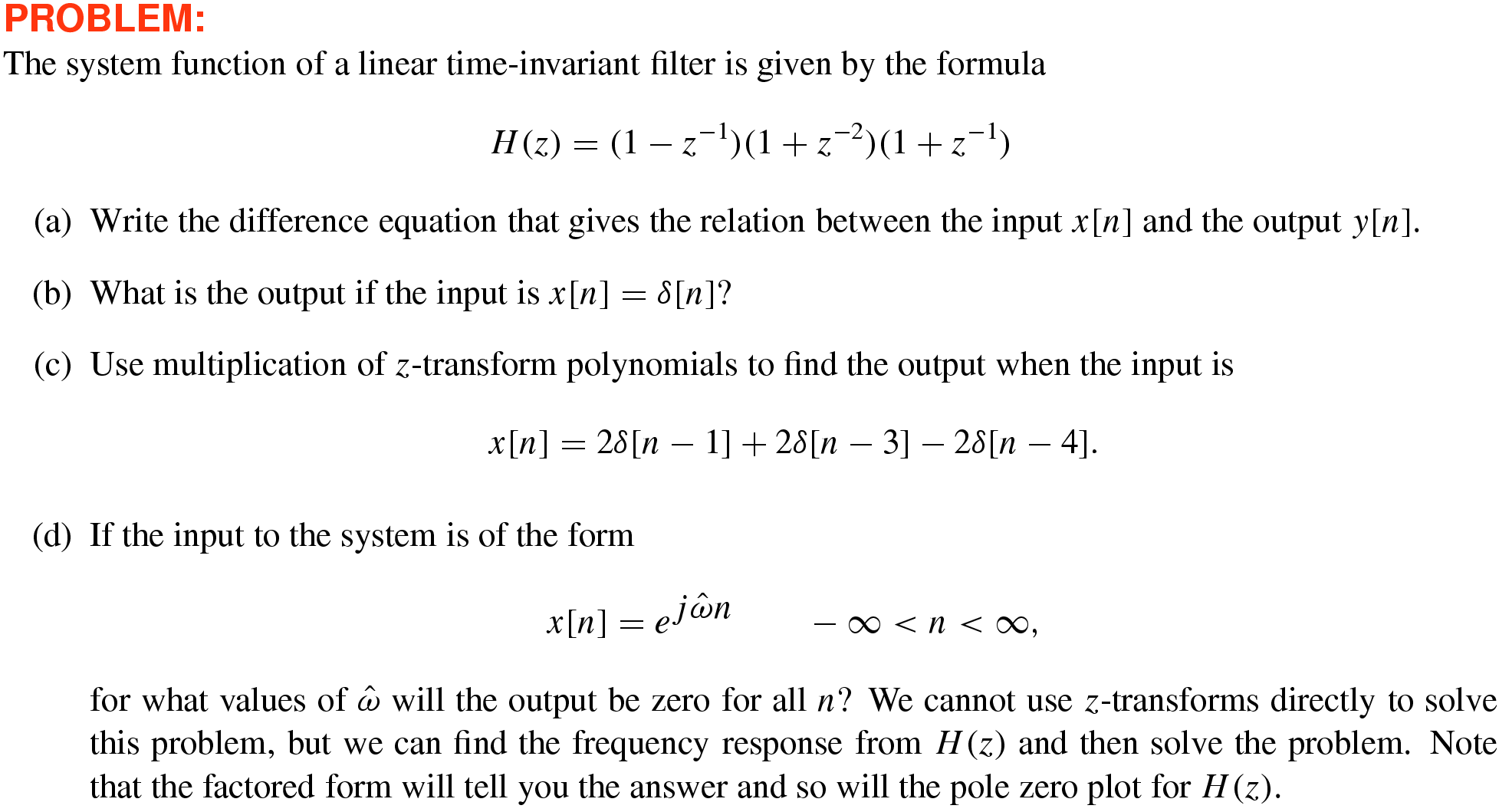
–29 Find Outputs of an FIR Filter Defined by a Factored System Function
Solution
9
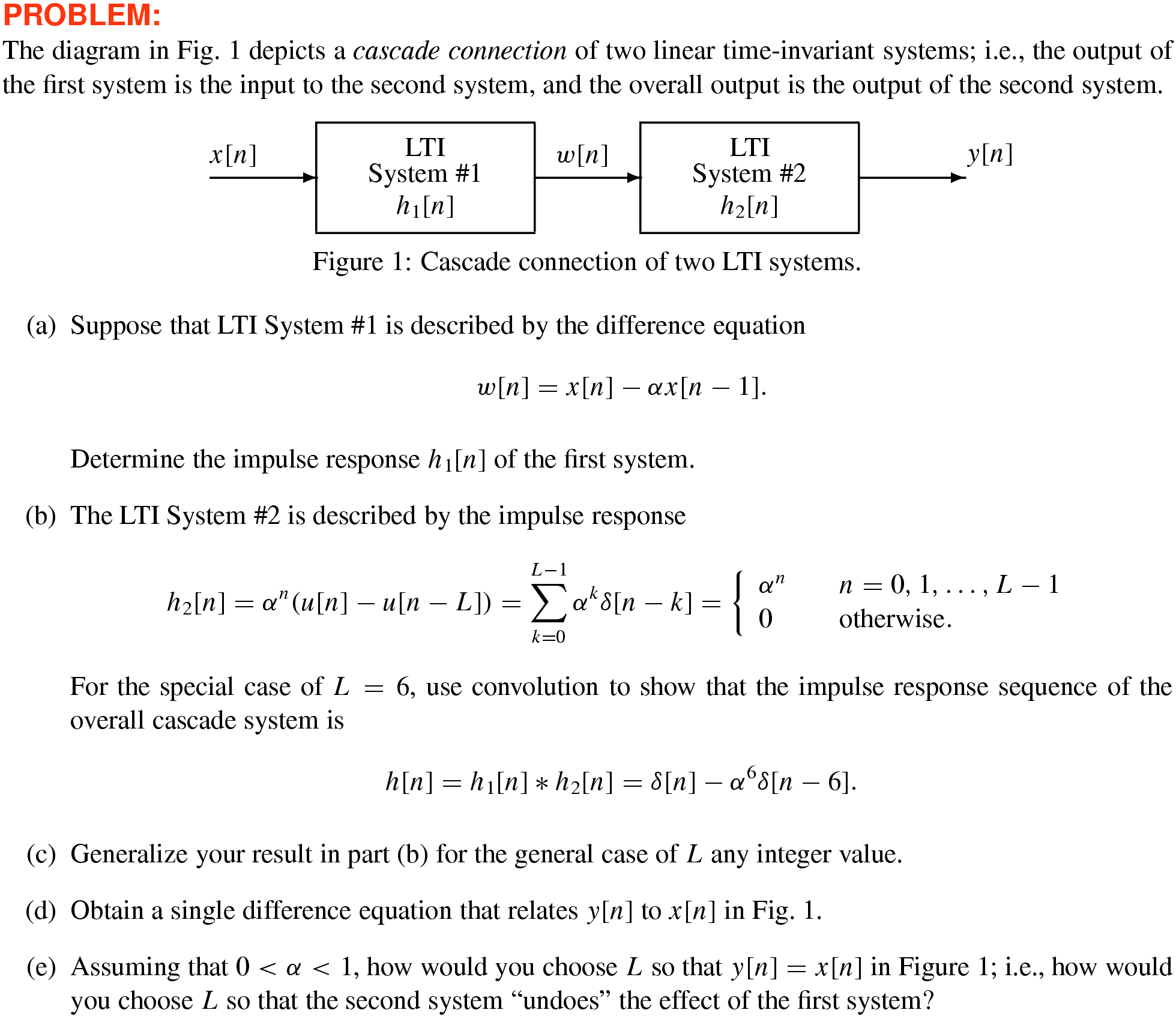
–30 Deconvolution in cascade of systems
Solution
9
–31 Frequency response & \(H(z)\) from MATLAB code
Solution
9
–32 Three domains: moving among them
Solution
9
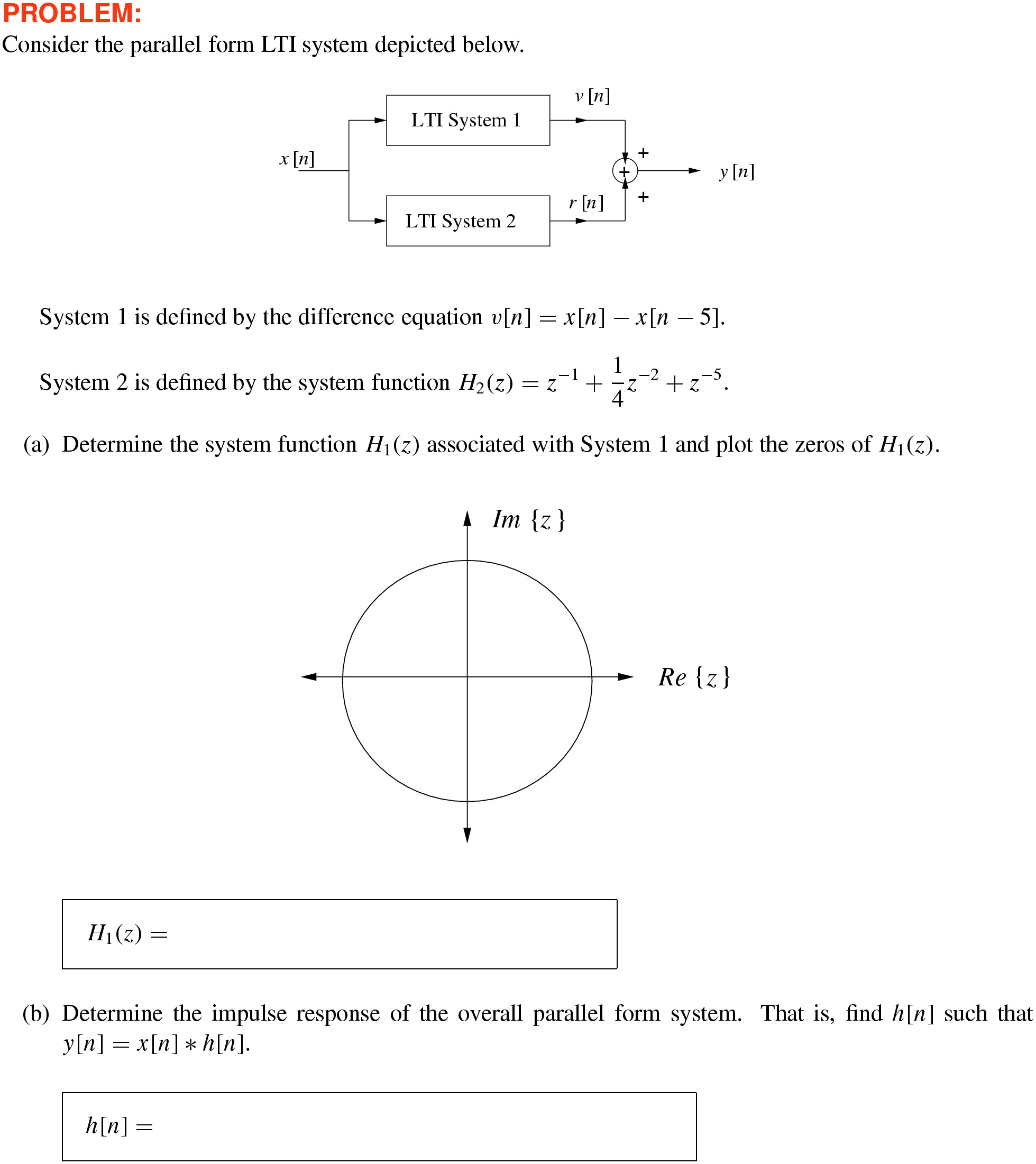
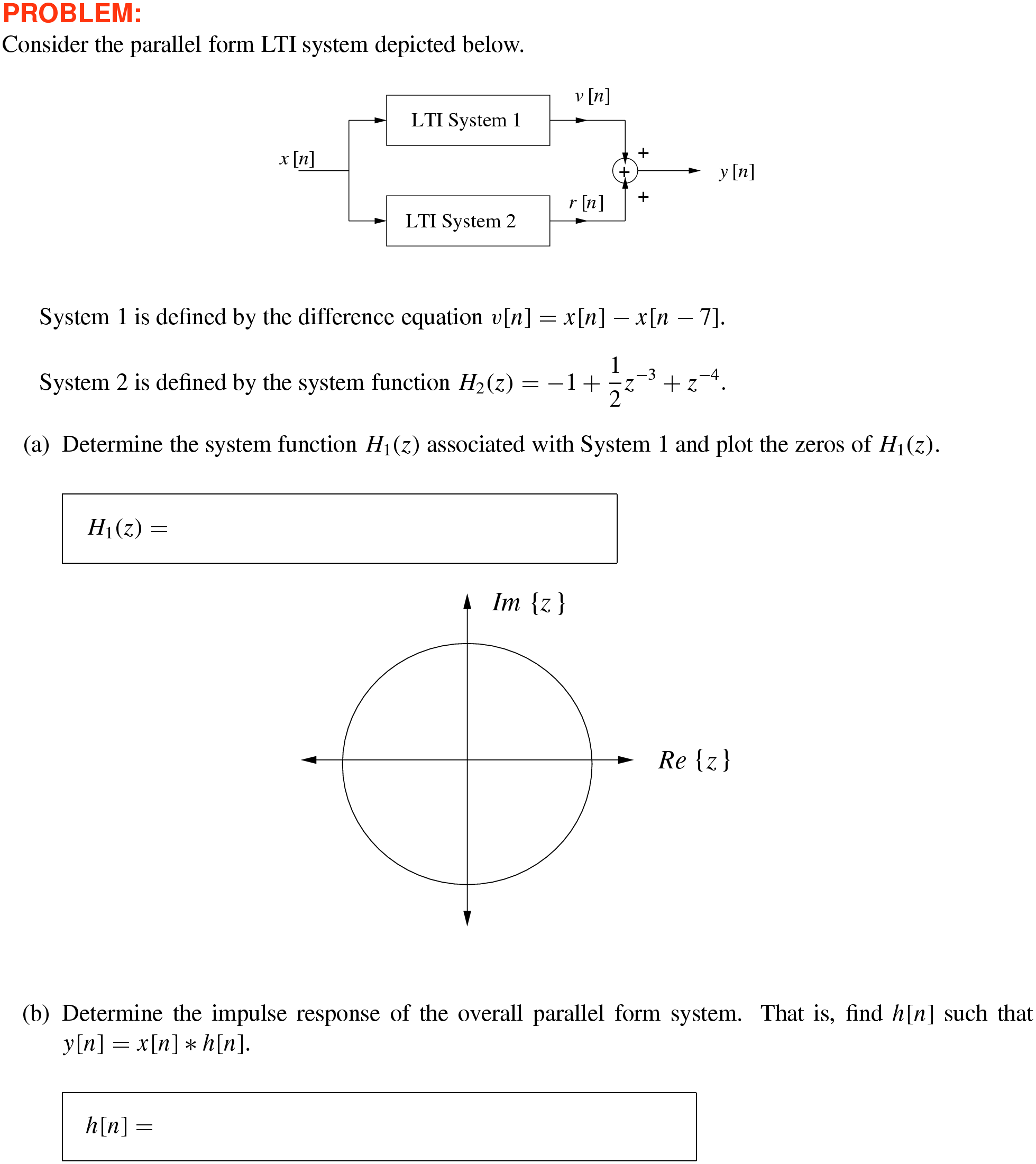
–33 Impulse response and \(H(z)\) for parallel connection
Solution
9
–34 Impulse response and \(H(z)\) for parallel connection
Solution
9
–35 Impulse response and \(H(z)\) for parallel connection
Solution
9
–36 \(H(z)\) for FIR Filter ♦ Zeros ♦ Frequency Response ♦ Sinusoidal Input
Solution
9
–37 Difference Equation from \(H(z)\) ♦ Impulse Response \(h[n]\)
Solution
9
–38 Difference Equation from \(H(z)\) ♦ Impulse Response \(h[n]\) ♦ Step Response
Solution
9
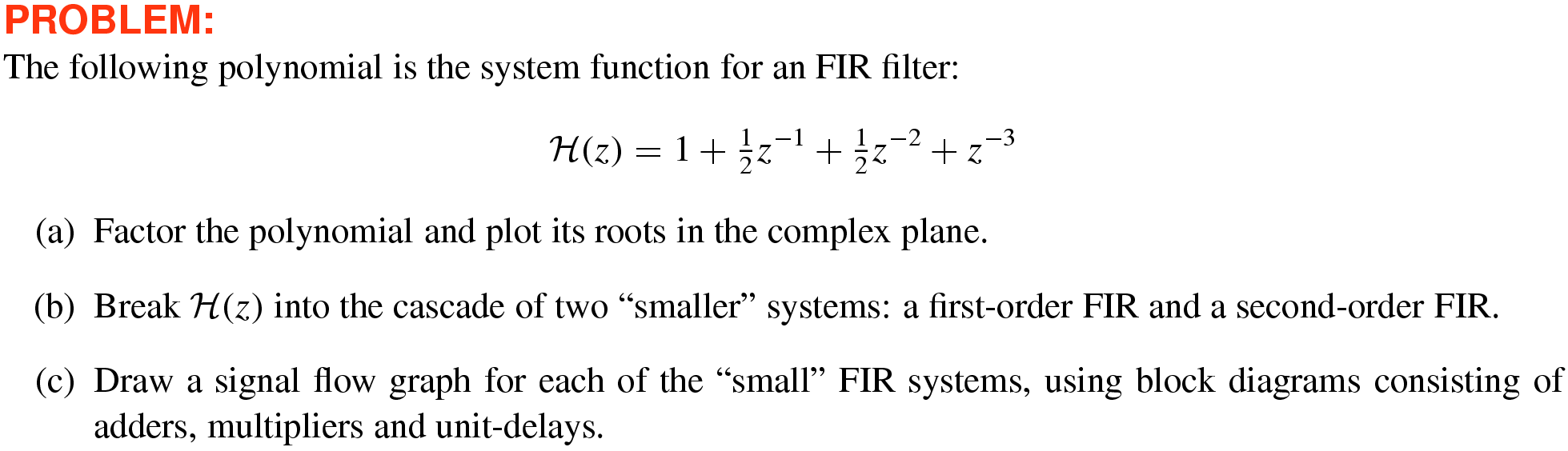
–39 \(H(z)\) Factored into Cascade of 2 FIR Systems
Solution
9
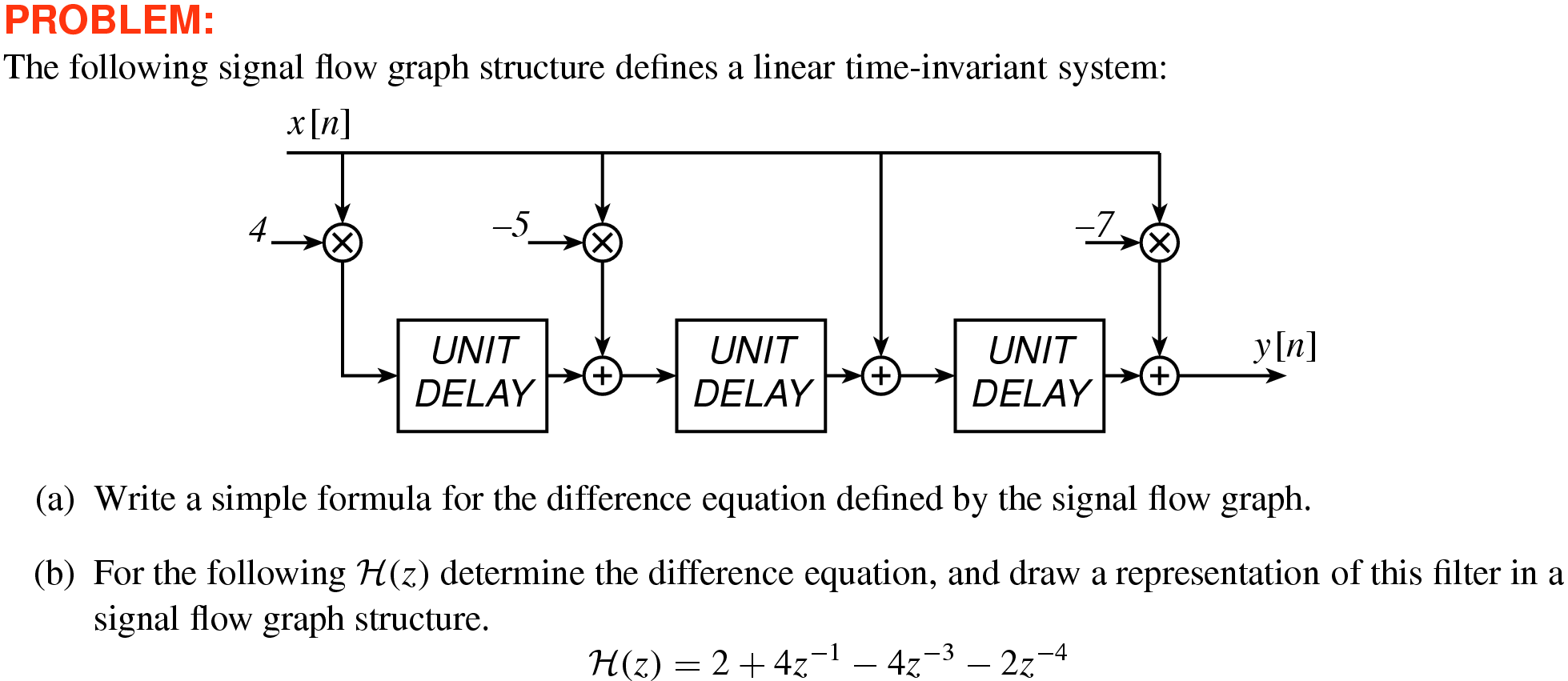
–40 \(H(z)\) and Difference Equation from Block Diagram for FIR Filter
Solution
9
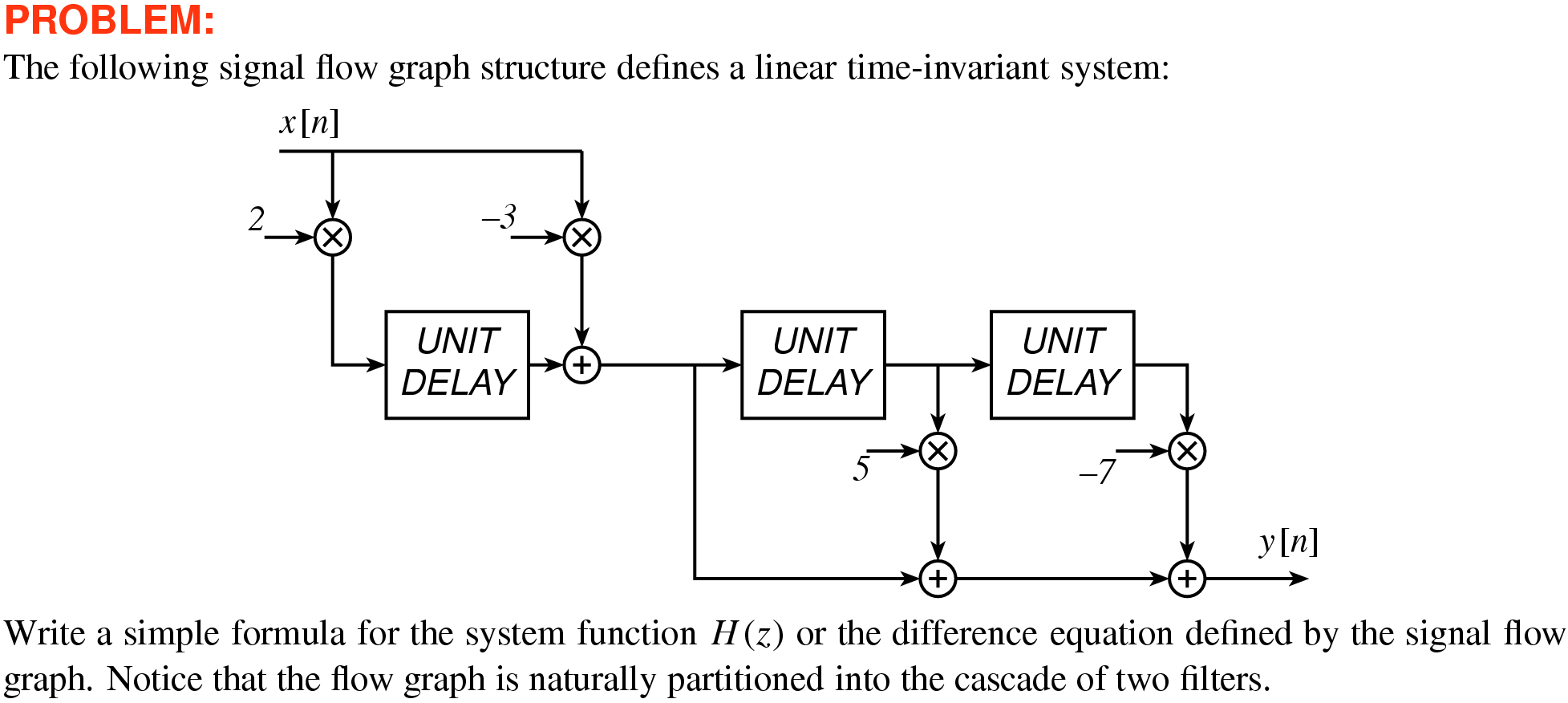
–41 \(H(z)\) and Difference Equation from Block Diagram for FIR Filter
Solution
9
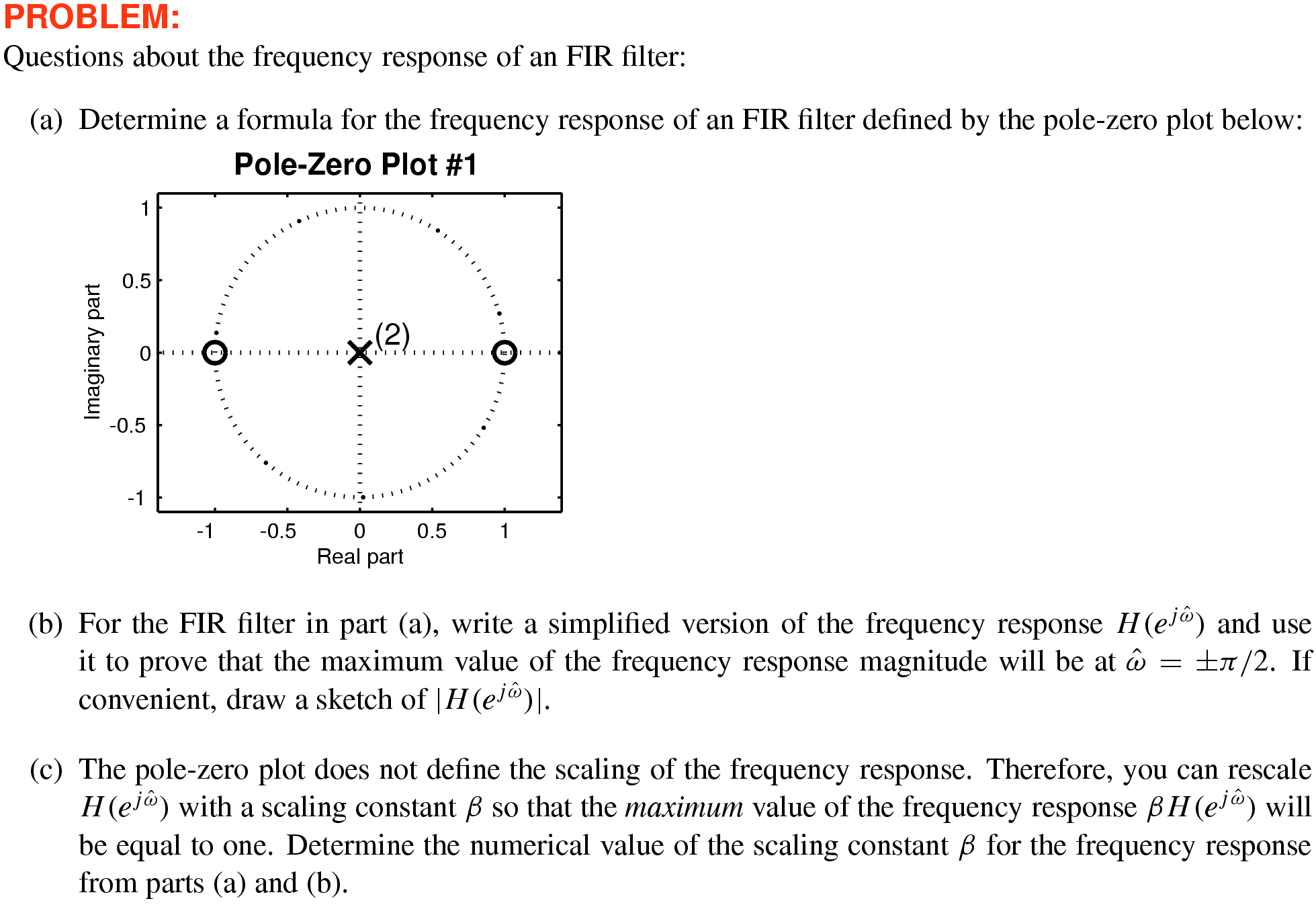
–42 Frequency Response from Pole-Zero Plot
Solution
9
–43 Discrete-Time Filtering of a Continuous-Time Signal
Solution
9
–44 Cascade of 3 LTI Systems
9
–45 Ouput of LTI System Function via \(z\mbox{-}\)Transforms
9
–46 Discrete-Time Processing of Continuous-Time Signals
Solution
9
–47 Cascade FIR Systems
Solution
9
–48 Discrete-Time Filtering of Continuous-Time Signals
Solution
9
–49 Zeros of Cascaded FIR Systems
Solution
9
–50 Frequency Response from \(H(z)\) ♦ Nulling ♦ Sinusoidal Input
Solution
9
–51 Output Signal \(y[n]\) from FIR \(H(z)\) and Complex Exponential Input \(x[n]\)
Solution
9
–52 Difference Equation from \(H(z)\) ♦ Frequency Response
Solution
9
–53 Complex Roots of Polynomial ♦ Plot in \(z\mbox{-}\)Plane
Solution
9
–54 Output Signal \(y[n]\) from FIR \(H(z)\) and Periodic Input Signal \(x[n]\)
Solution
9
–55 \(H(z)\) for FIR Filter ♦ Zeros ♦ Complex Exponential Inputs
Solution
9
–56 Cascade of 3 FIR Systems: Obtain Overall Difference Equation
Solution
9
–57 Output Signal \(y[n]\) from FIR \(H(z)\) and Complex Exponential Input \(x[n]\)
Solution
9
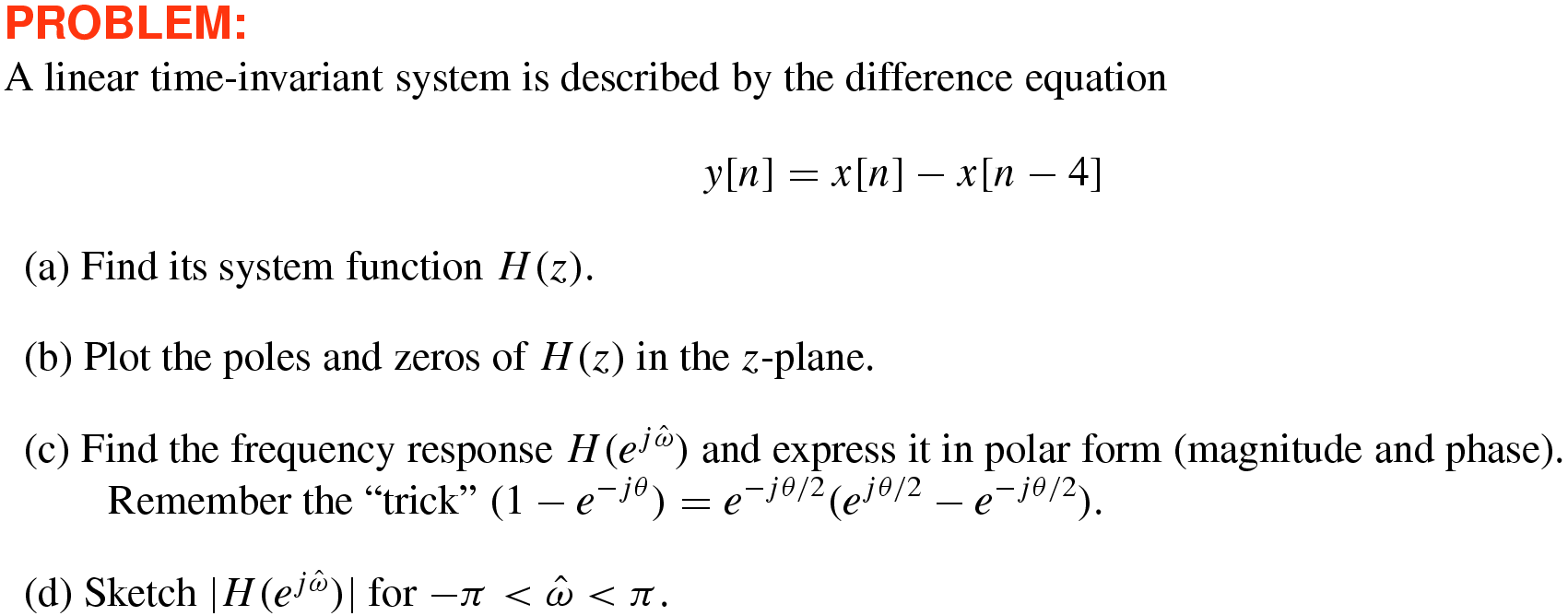
–58 Frequency Response and \(H(z)\) from Difference Equation
9
–59 Output via \(z\mbox{-}\)transform method
9
–60 Output Signal \(y[n]\) from FIR \(H(z)\) and Various Inputs
9
–61 Cascade of 2 FIR Systems ♦ \(H(z)\) ♦ Impulse Response \(h[n]\)
Solution
9
–62 Output Signal \(y[n]\) from FIR \(H(z)\) and Various Inputs
Solution
9
–63 Difference Equation from \(H(z)\) ♦ Zeros & Poles
Solution
9
–64 \(H(z)\) for FIR Filter ♦ Zeros ♦ Frequency Response
Solution
9
–65 Difference Equation from \(H(z)\) ♦ Zeros & Poles ♦ Impulse Response \(h[n]\)
Solution
9
–66 Cascade of 2 FIR Systems ♦ \(H(z)\) ♦ Difference Equation ♦ Impulse Response \(h[n]\)
Solution
9
–67 Pole-Zero Plot for \(H(z)\) ♦ Nulling Sinusoidal Inputs ♦ Length of FIR Filter
Solution
9
–68 Design FIR \(H(z)\) to Null Sinusoidal Inputs Sampled by C/D
Solution
9
–69 Difference Equation from \(H(z)\) ♦ Frequency Response ♦ Impulse Response \(h[n]\)
Solution
9
–70 Complex Roots of Polynomial ♦ Plot in \(z\mbox{-}\)Plane
Solution
9
–71 Difference Equation from \(H(z)\) ♦ Frequency Response ♦ Sinusoidal Input
Solution
9
–72 Difference Equation from \(H(z)\) ♦ Zeros & Poles
Solution
9
–73 Difference Equation from \(H(z)\) ♦ Zeros ♦ Complex Exponential Inputs
Solution
9
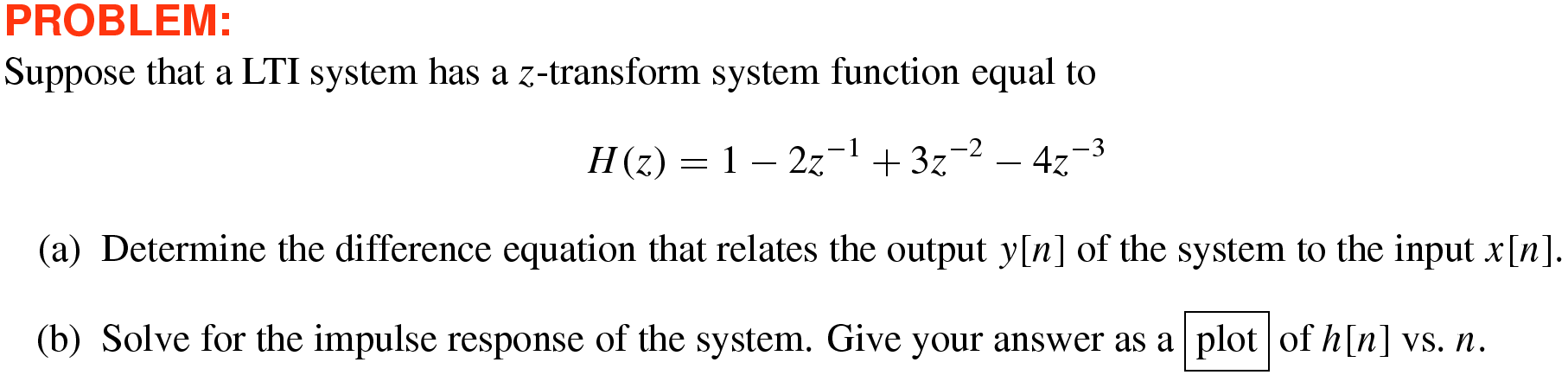
–74 Difference Equation from \(H(z)\) ♦ Impulse Response \(h[n]\)
Solution
9
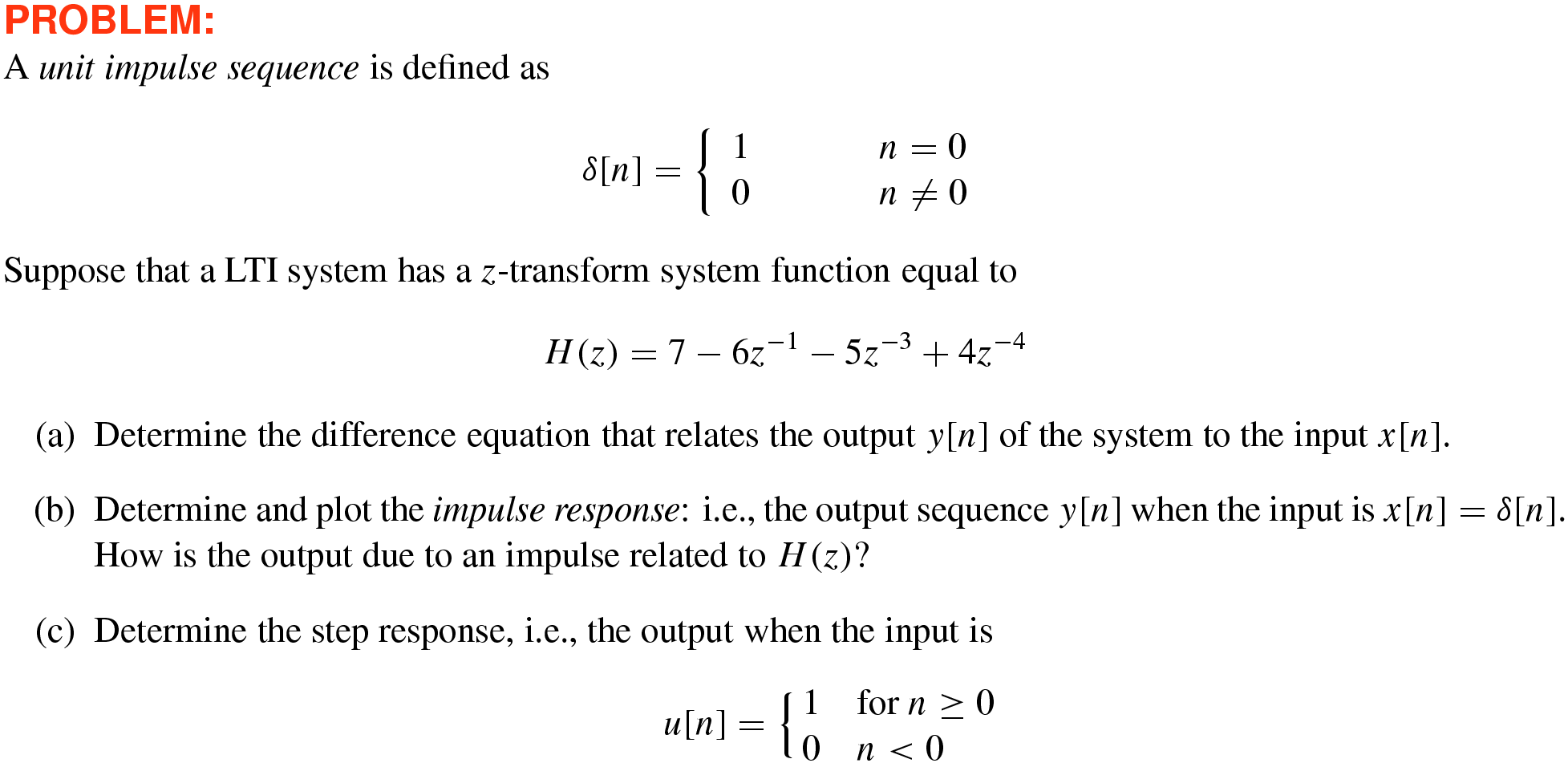
–75 Difference Equation from \(H(z)\) ♦ Impulse Response \(h[n]\) ♦ Step Response
Solution
9
–76 Digital Filtering of Continuous-Time Signals
9
–77 Sum of Signals through \(H(z)\)
9
–78 Difference Equation and \(H(z)\) for Cascaded Systems
9
–79 Difference Equation for Cascade of 3 Systems
9
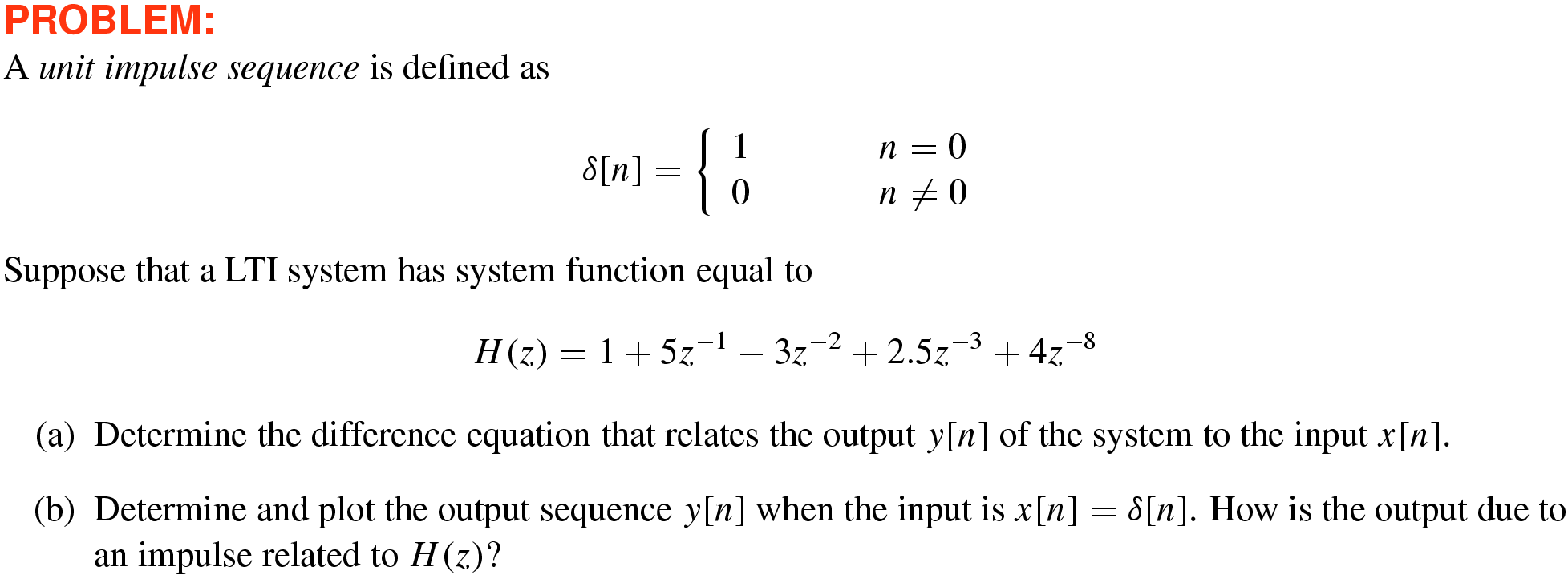
–80 Difference Equation from \(H(z)\) ♦ Impulse Response \(h[n]\)
Solution
9
–81 Discrete-Time Filtering of a Continuous-Time Signal
Solution
9
–82 Discrete-Time Filtering of a Continuous-Time Signal
Solution
9
–83 Response of LTI System Function
Solution
9
–84 Discrete-Time Processing of Continuous-Time Signals
Solution
9.7
–85 Complex Roots of Polynomial ♦ Plot in \(z\mbox{-}\)Plane
Solution
9.12
–86 Cascade of Systems
Solution
9.14
–87 Response of Cascade
Solution
9.15
–88 Filter plus A/D and D/A
Solution
9.16
–89 Cascade of 2 FIR Systems ♦ \(H(z)\) ♦ Impulse Response \(h[n]\)
Solution